Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
Added MATEKF411SE_SS2_CH6 variant (#6895)
This moves SS2 from TX2 to Ch6, so that UART 2 remains full, while allowing SS2 support, for things like ESC telemetry.
- Loading branch information
Showing
4 changed files
with
47 additions
and
10 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,26 @@ | ||
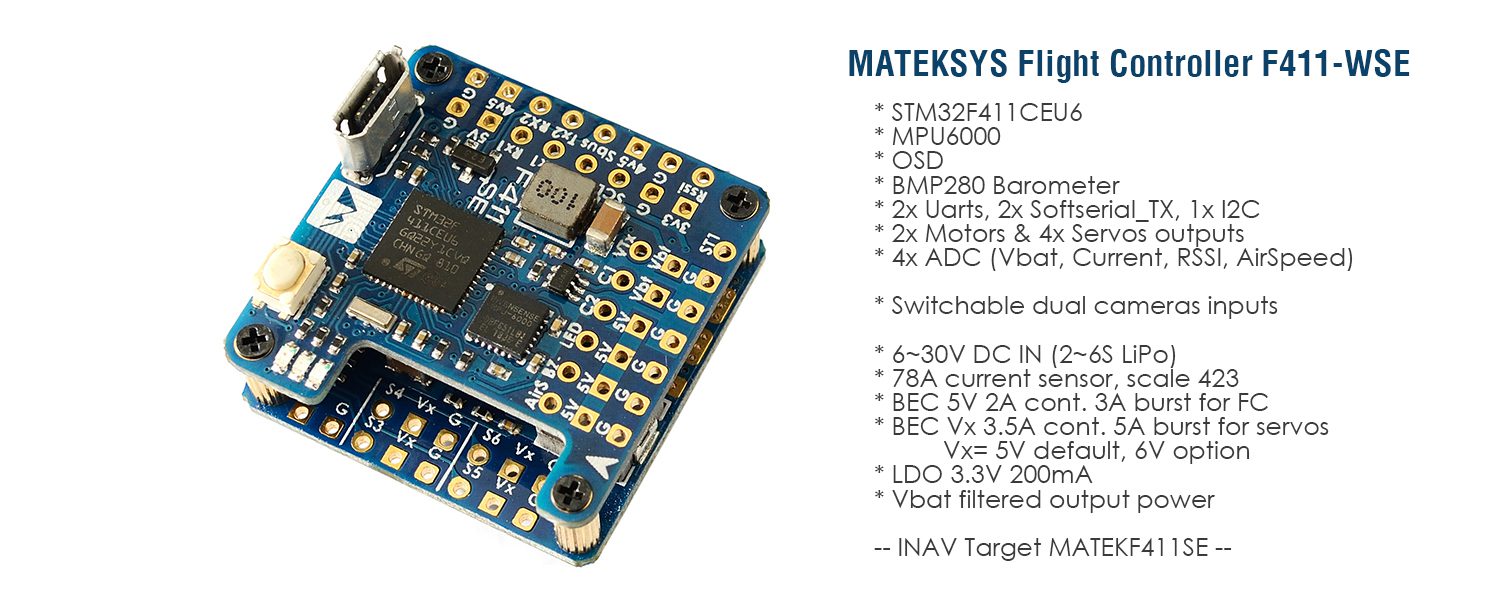
| # Board - [MATEKSYS F411-WSE](http://www.mateksys.com/?portfolio=f411-wse) | ||
|
|
||
|  | ||
|
|
||
| ## Specification: | ||
|
|
||
| * STM32F411 CPU | ||
| * OSD | ||
| * BMP280 barometer | ||
| * Integrated PDB for 2 motors | ||
| * 2 UART ports | ||
| * 6 servos | ||
| * no SD card slot | ||
| * 3 BECs | ||
|
|
||
| ## Details | ||
|
|
||
| * [Full specification](http://www.mateksys.com/?portfolio=f411-wse) | ||
| * SBUS pad has a built-in inverter and is connected to UART2 RX | ||
|
|
||
| ## Available TARGETS | ||
|
|
||
| * `MATEKF411SE` Stock target. LED control and have SS1 on ST1 pad, SS2 on TX2 pad. | ||
| * `MATEKF411SE_PINIO` Adds USER 2 PINIO support on the LED pad. | ||
| * `MATEKF411SE_FD_SFTSRL1` Adds full duplex SS1 by putting the RX on the LED pad. | ||
| * `MATEKF411SE_SS2_CH6` SS2 moved to Ch6 pad. This keeps UART 2 as a full UART (for example, for use with Crossfire) and SS2 support. |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -1,3 +1,4 @@ | ||
| target_stm32f411xe(MATEKF411SE) | ||
| target_stm32f411xe(MATEKF411SE_PINIO) | ||
| target_stm32f411xe(MATEKF411SE_FD_SFTSRL1) | ||
| target_stm32f411xe(MATEKF411SE_SS2_CH6) |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters