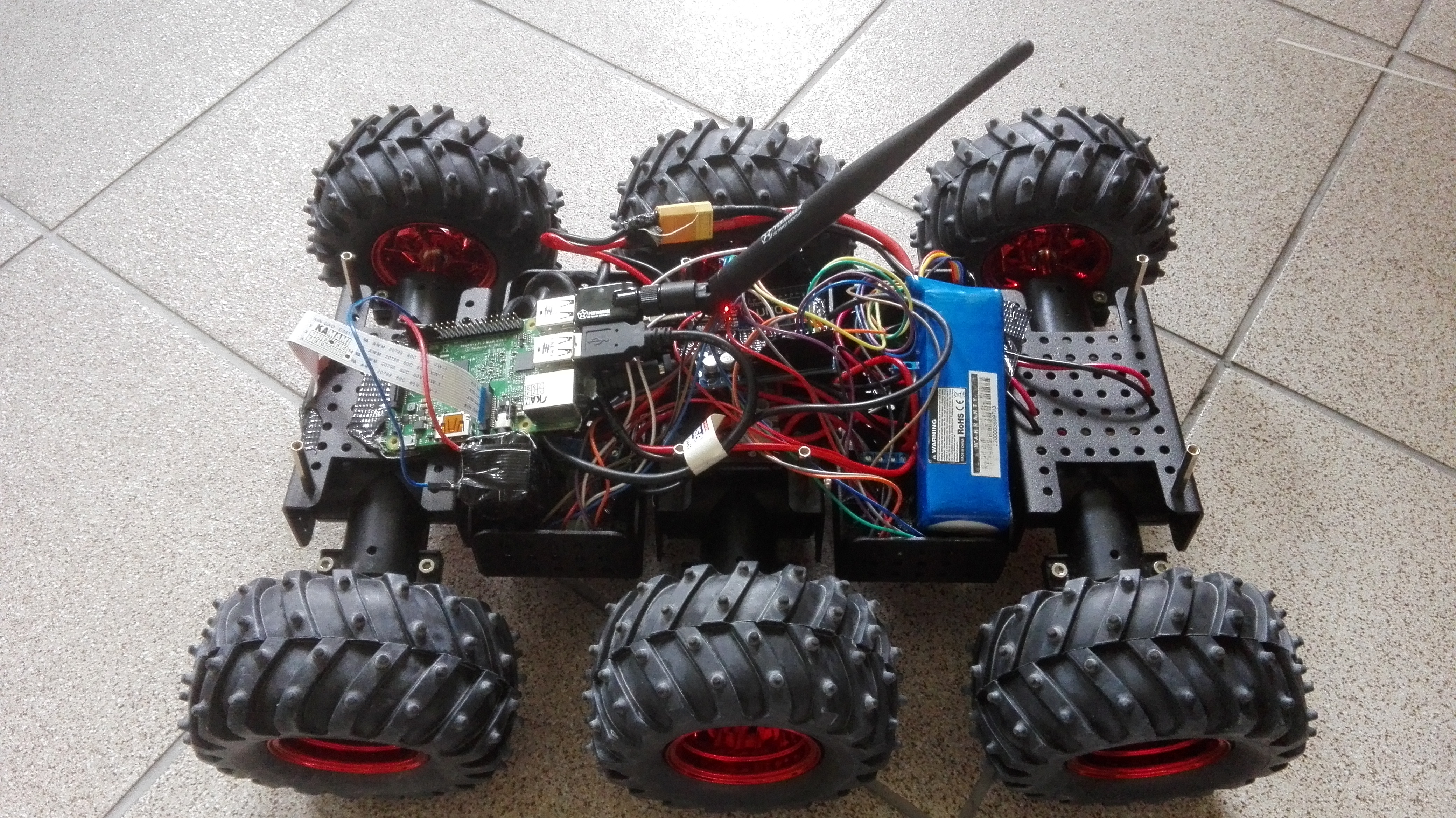
Hardware settings of six wheel platform
- six-wheel car platform
- motor driver x 3
- Arduino
- Raspberry Pi
- cables
- 12V battery
- 5V battery
- USB cable for Arduino
- Wifi module for Raspberry Pi
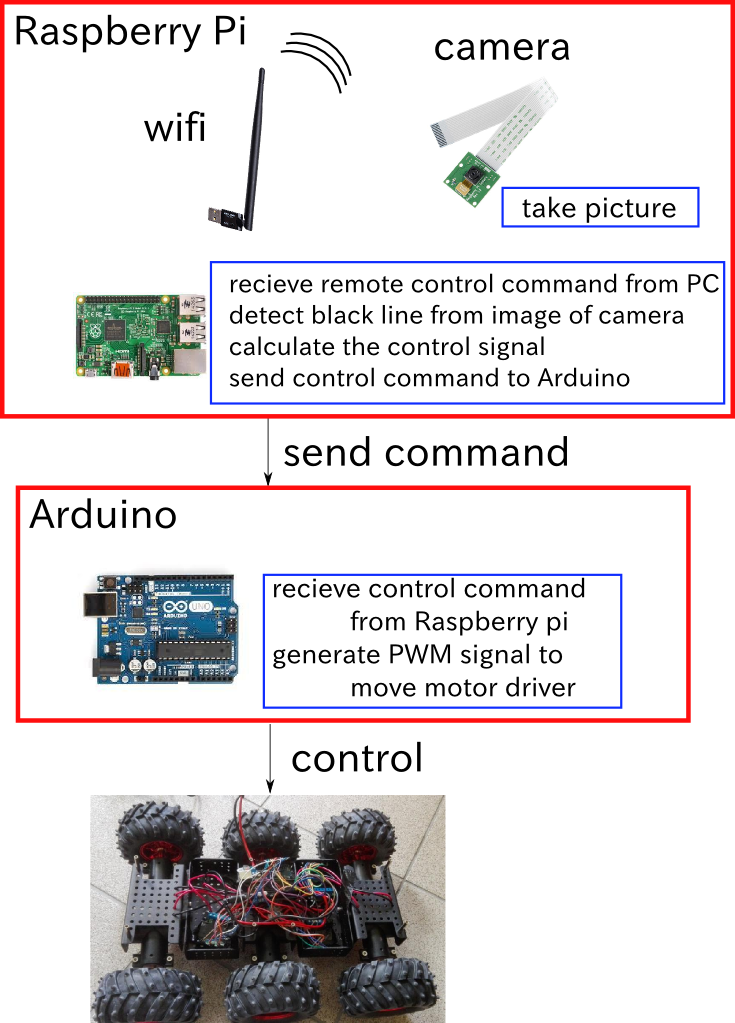
The whole architecture is like this.
 ##1. Connect Motor drivers and Arduino
Pin names of the motor driver are like below.
##1. Connect Motor drivers and Arduino
Pin names of the motor driver are like below.
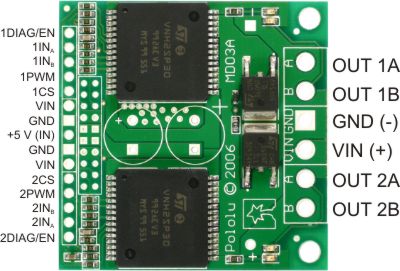
Connect Arduino and motor driver as the table below.
| Arduino Pin | Motor Driver number | Motor Driver Pin |
|---|---|---|
| 3 | 1 | 1PWM |
| 2 | 1 | 1INA |
| 4 | 1 | 1INB |
| 5 | 1 | 2PWM |
| 7 | 1 | 2INA |
| 8 | 1 | 2INB |
| Arduino Pin | Motor Driver number | Motor Driver Pin |
|---|---|---|
| 6 | 2 | 1PWM |
| 12 | 2 | 1INA |
| 13 | 2 | 1INB |
| 9 | 2 | 2PWM |
| A5 | 2 | 2INA |
| A4 | 2 | 2INB |
| Arduino Pin | Motor Driver number | Motor Driver Pin |
|---|---|---|
| 10 | 3 | 1PWM |
| A3 | 3 | 1INA |
| A2 | 3 | 1INB |
| 11 | 3 | 2PWM |
| A1 | 3 | 2INA |
| A0 | 3 | 2INB |
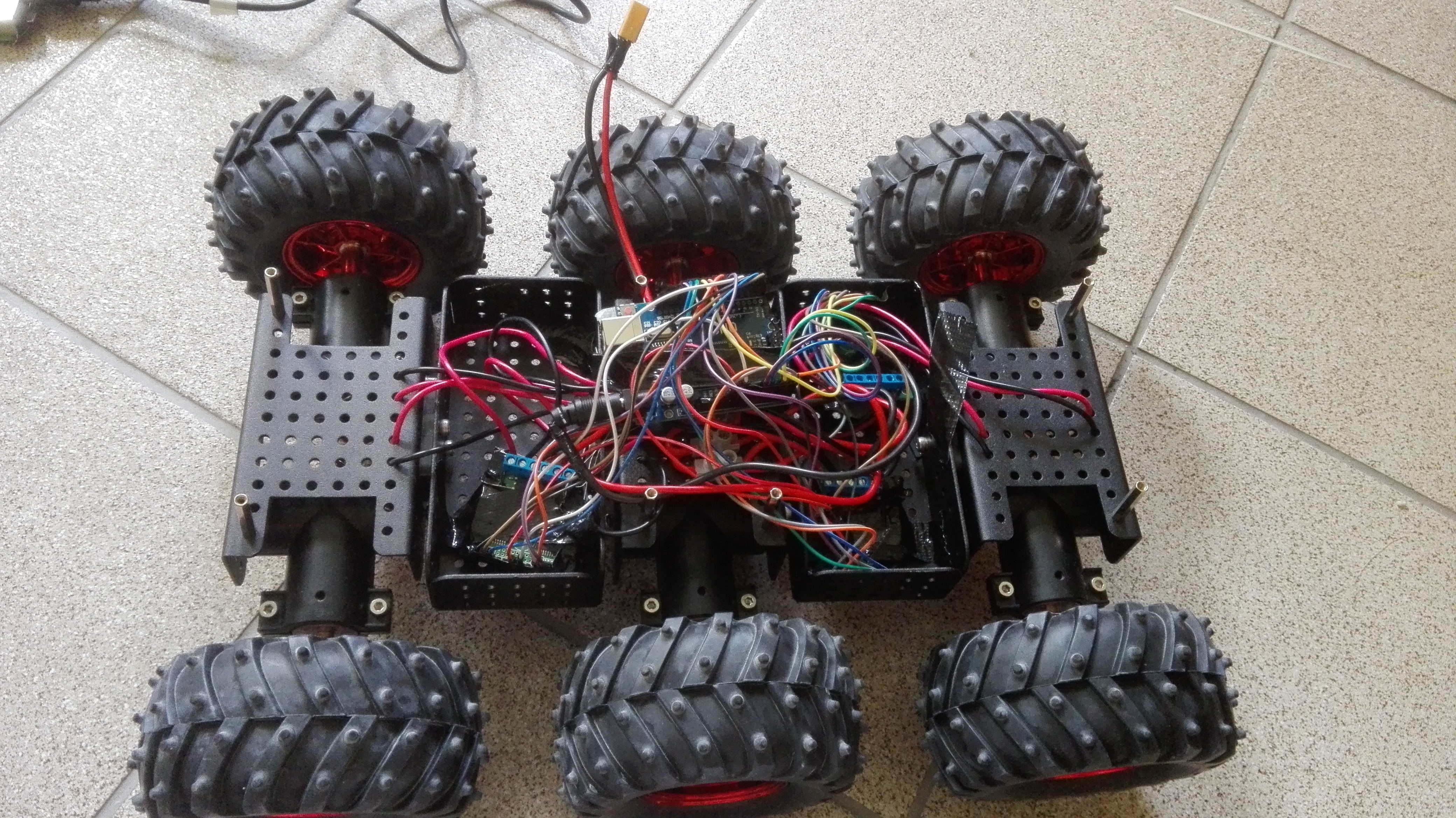
It would be like this.
The gpio pin header is like this.
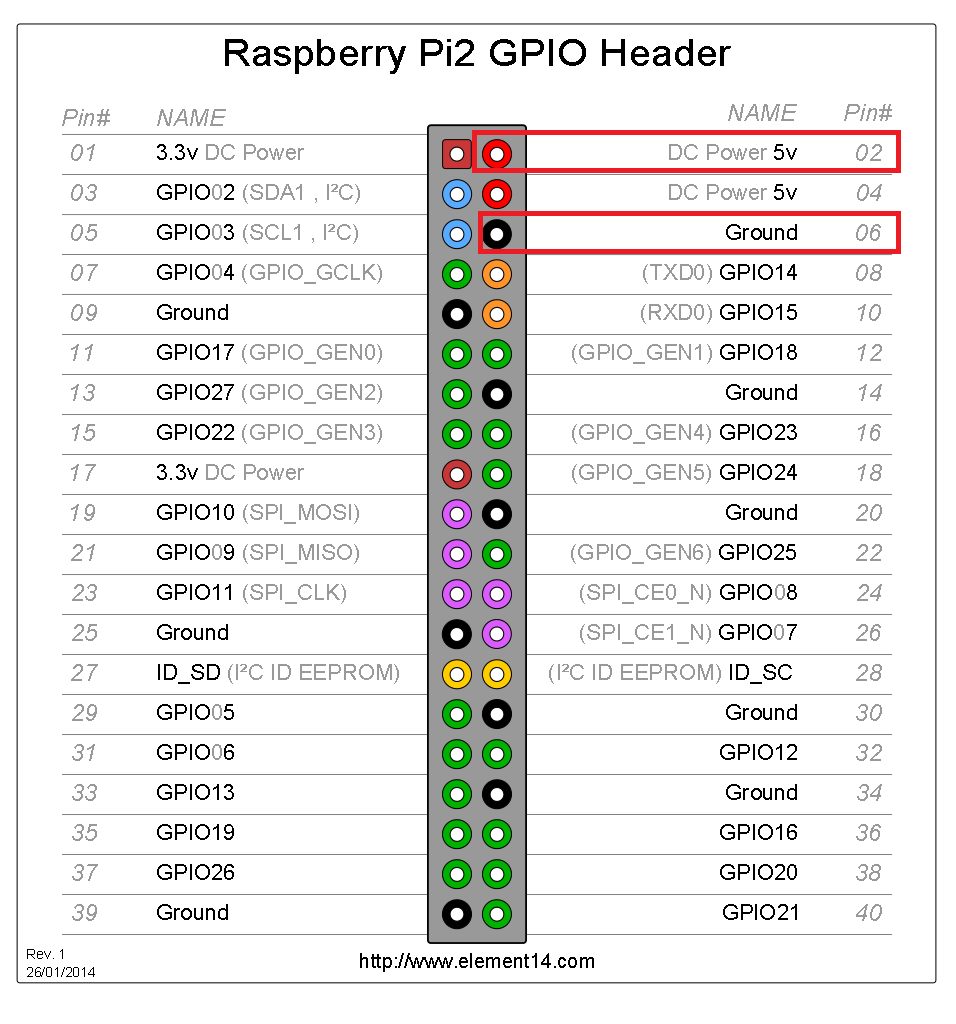 Connect 5V battery to this DC Power 5V and Ground
Connect 5V battery to this DC Power 5V and Ground
Reference: How do I power my Raspberry Pi?
Before connection, it would be like this.
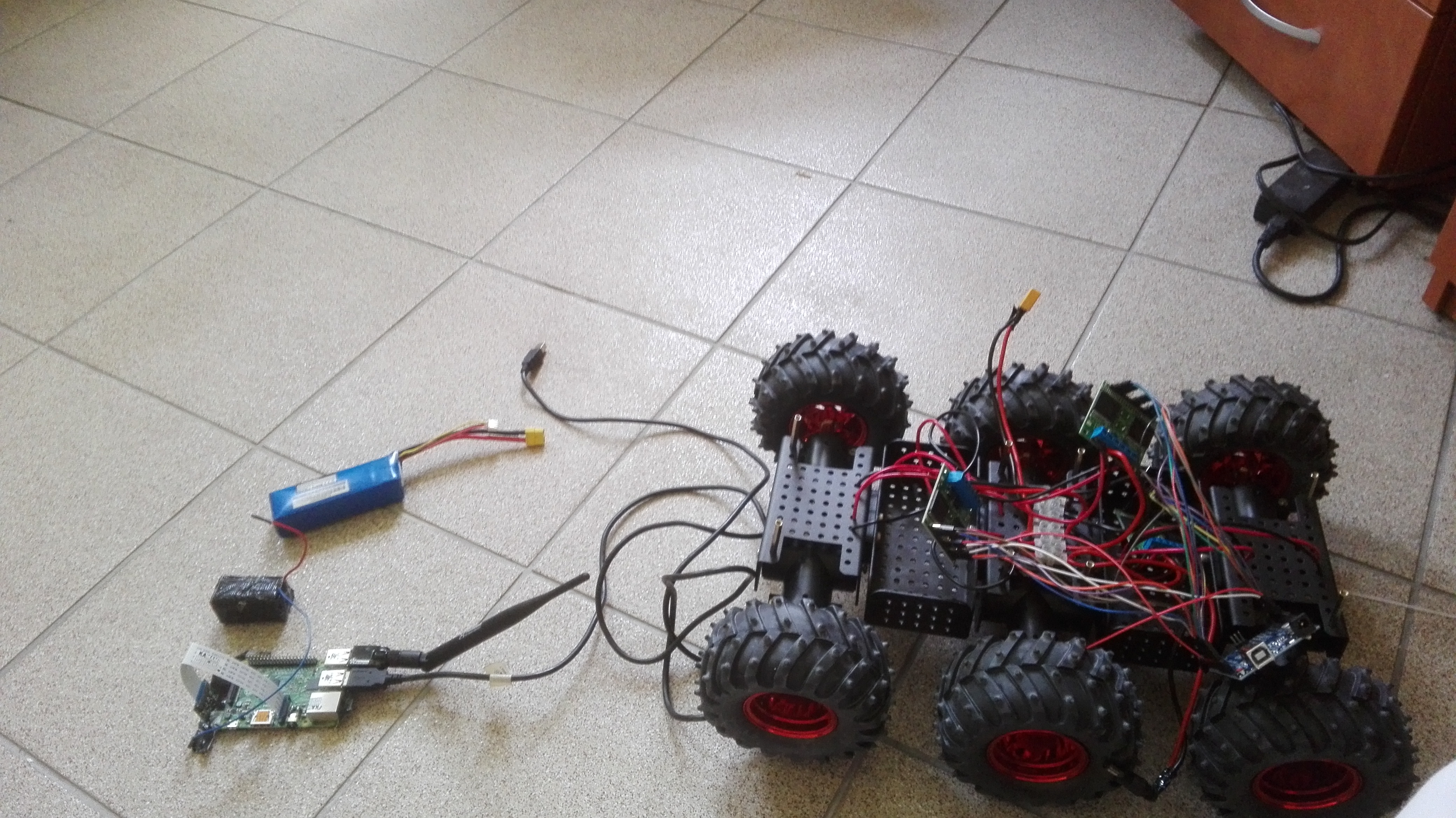 After connection, if would be like this.
After connection, if would be like this.