WPGの開発 #14
Comments
|
まずは、理論の勉強を... |
|
息抜きに、静歩行を実装してみた。 |
|
各関節の角速度を得るために、ヤコビ行列を実装した。合ってそうな値が得られたので、ひとまずOKということで。 以下、例。 この時、脚の末端を垂直に0.1[m/s]持ち上げたときの、各関節角速度。 一応、このときのヤコビ行列とその逆行列。 上記ヤコビ行列の逆行列 以下、例のイメージ図。 |

|
これで、基準点(今回の場合は、重心と同位置)の位置・速度・角速度から、各関節の角度と角速度を求める手法が揃った(はず)。 角度 -> IK 追記: |
|
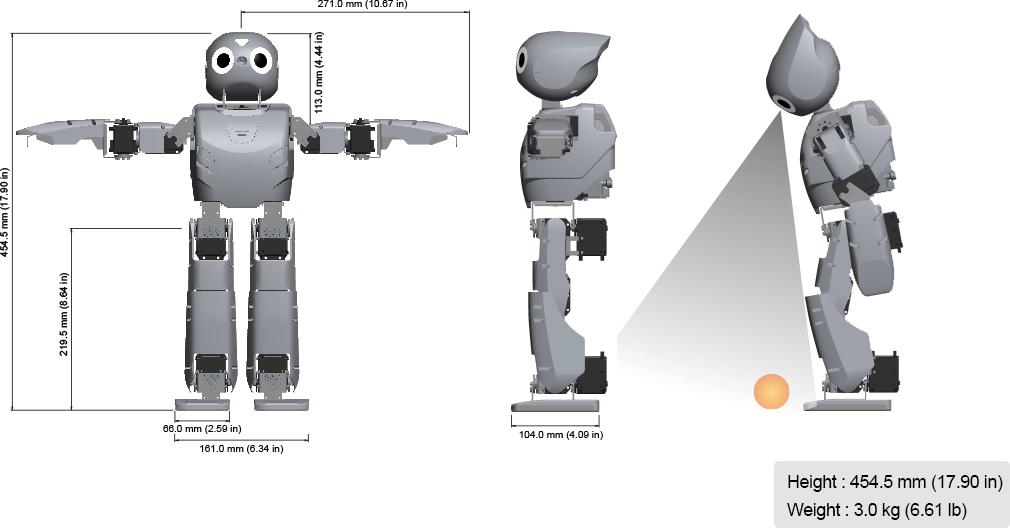
本格的な動歩行の実装に向けて、開発を勧めていく。 ROBOTIS OP2の重量・足裏から腰までの高さ。 これを元に、軌道エネルギーの式を立てて、歩行パラメータを構築する。そしたら、歩行パターン生成のための実装を進めていく。 実装方法は、はじめは動けば良いので、WebotsRobotHandlerに直接実装する。step()でリアルタイムに生成するのではなく、init()で歩行パターンを全て計算しておき、step()で順次パターンを読んで動かす方法を取る。 |
{kind=link}
|
動歩行の実装 なので、WPG nodeに移行・実装していく。 ついでに、リファクタリングとか整理をする。 |
|
|
動歩行動作の生成をWPGへ移行できた。 ただ、問題が幾つか発生した。
|
|
Pub/Subでの動歩行の動画。Lossのせいで乱れが大きい。 walking_no13_pub-sub.mp4Service通信に移行するべき。 |
|
WPG化は済んでいるが、pub/subのせいかdata lossがちょいある。service通信を検討するためにissueは閉じない。 QoSいじればなんとかなるか?これも検討 |
|
あとアレだ。 動歩行の理論の部分を、もう一度筆記でまとめ直したほうが良いかも。で、どっかにちゃんとまとめて記録しておくべき。 |
参考書に準ずる。3次元線形倒立振子モデルで進めたい。
The text was updated successfully, but these errors were encountered: