Is the new simulator working for anyone? #74
Comments
|
Original comment by Alfredo Bencomo (Bitbucket: bencomo). Hi Neil, What exact errors are you getting? |
|
Original comment by Neil Johnson (Bitbucket: realdealneil1980). I am seeing the errors posted on Issue #72. I have now tried using the docker installation, and I don’t get those errors, but I am not able to drive the robots when using team.ign. I don’t really see any errors other than “No processes to monitor” …”Shutting down process monitor complete” We have tried on several different computers, all of which work with the gazebo9 version, but none of which work with the team.ign launch. |
|
Original comment by Martin Dlouhy (Bitbucket: robotikacz). I can confirm, that if I want to follow “Catkin workspace install” I end up with You might want to run 'apt --fix-broken install' to correct these. |
|
Original comment by Alfredo Bencomo (Bitbucket: bencomo). Martin/Neil, We have committed several updates the last few days, so would you mind running a full installation again? Delete your current /subt_ws directory (rm -rfv subt_ws/) and clear your Then, before you execute the steps listed here again, run this command first:
Now proceed with the steps listed here. Let me know if you are able to test the installation with the command in Step 6 ( |
|
Original comment by Adam Uccello (Bitbucket: uccellap). I have been unable to get the IGN stack working either. Trying to load the 'competition.ign' shows the 'home-base' and the tunnel entrance, but none of the actual tunnels load. If I fire up 'team.ign' afterward, a few pieces of the tunnel show up (some of the 'straight line' down the middle ones), but not all of it, and I can't use the joystick to control anything. Note that this is on the same machine that the Gazebo9 stuff is working just fine. I’m attempting to use the docker setup. |
|
Original comment by baila (Bitbucket: baila). Hi Alfredo, I followed your steps as well. While I am not getting any error at the beginning during step-6 ( [GUI] [Msg] Loaded plugin [GzScene3D] from path [/usr/lib/x86_64-linux-gnu/ign-gazebo-2/plugins/gui/libGzScene3D.so] -- Control frame information ----------------------------------------------- -- Ruby level backtrace information ---------------------------------------- -- Machine register context ------------------------------------------------ -- C level backtrace information ------------------------------------------- |
|
Original comment by Alfredo Bencomo (Bitbucket: bencomo). baila (baila) You already indicated that you’re running from catkin install. However, were you previously using the docker installation as well? And, does error trace occur during the launch or when you exit (ctrl-c)? If it's the former, then that is why you see the Ignition window coming up with white canvas only and we need to figure out why you are getting that failure. |
|
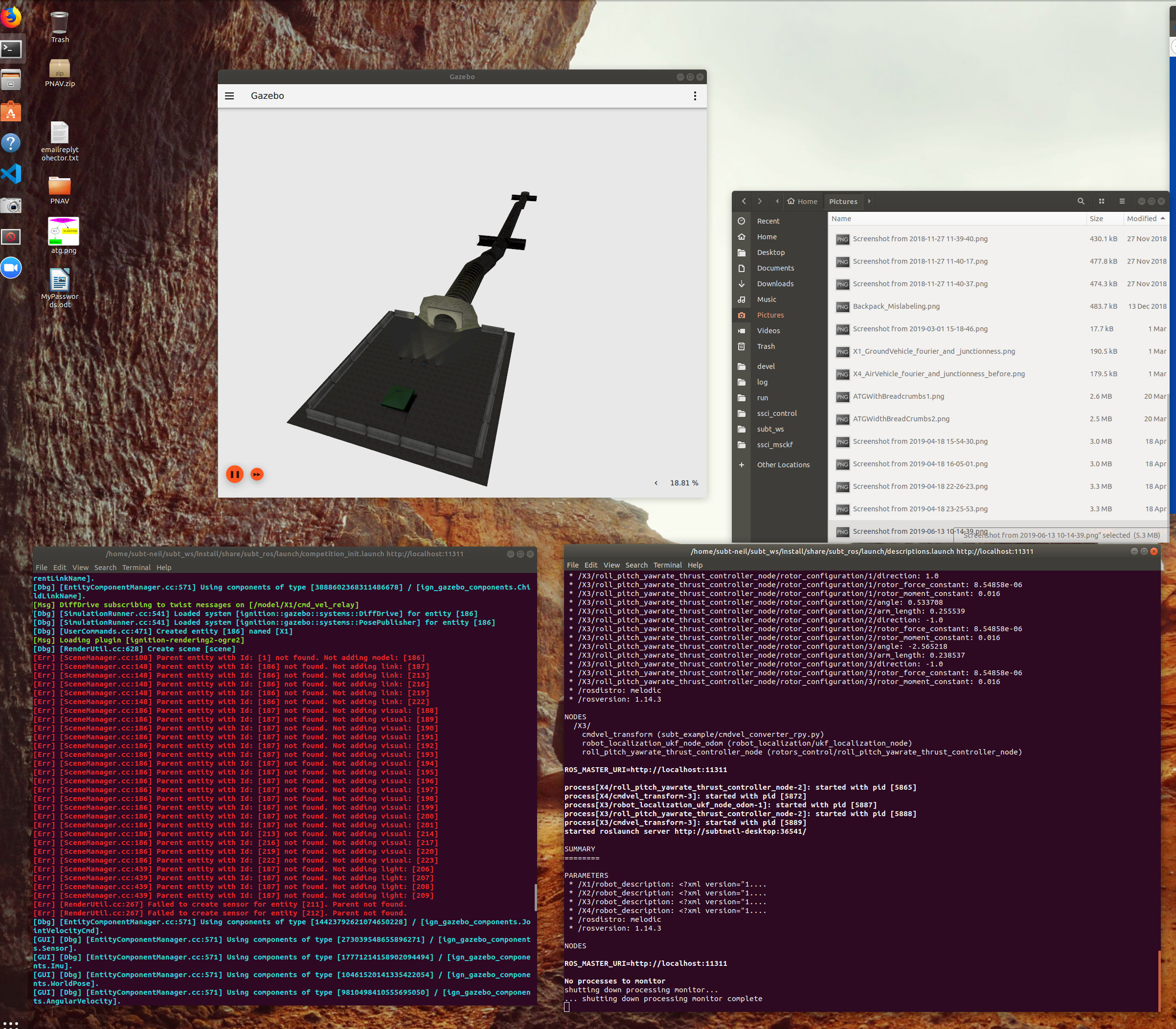
Original comment by Neil Johnson (Bitbucket: realdealneil1980). Alfredo Bencomo (bencomo) I tried reinstalling per your instructions above, but I’m getting the same results. I am attaching a screenshot of what the gazebo window and my terminals show:
The errors are always about parent entities not being found. I’m wondering if ignition is having a hard time loading models…I think I saw that some of the models are being loaded from remote URLs. Maybe their not downloading properly? Is it possible to force ignition to download everything? If I do a verbose listing of the files in the ignition models class, would that help debug things at all? |
|
Original comment by Neil Johnson (Bitbucket: realdealneil1980). In case this is helpful, here’s the directory listing for the ignition models: subt-neil@subtneil-desktop:~/.ignition/fuel/fuel.ignitionrobotics.org/openrobotics/models$ ls -l |
|
Original comment by Alfredo Bencomo (Bitbucket: bencomo). Neil, If you deleted the /models folder under ~/.ignition/fuel/fuel.ignitionrobotics.org/openrobotics/, then yes, it’s going to download them when launch ign again. Assuming that you already did a new fresh install and removed the /model folder, then can you just shutdown all the windows, reboot, and open just one terminal. Then just execute these commands on that single terminal window:
|
|
Original comment by baila (Bitbucket: baila).
Error logs for blank canvas |
|
Original comment by baila (Bitbucket: baila). Hi Alfredo Bencomo (bencomo) , I am using catkin only. I never used docker on my setup. The log posted in my earlier comment, it came when I choose GzScene3D from the drop down menu at top-right corner. Next I tried the commands you suggested above. This time some error lines came up. I have attached the logs in error.log file. I am also attaching the screenshot of blank canvas. Notice that it shows the Ignition icon as ‘Unknown’. I am not sure whether it is expected or not. |
|
Original comment by Neil Johnson (Bitbucket: realdealneil1980). Alfredo Bencomo (bencomo) I ran the command you mentioned yesterday. I see the virtual_stix environment show up, but the vehicles didn’t populate. There were a few lines of red text in the gazebo output: Early on, I get this one: [Err] [LevelManager.cc:134] Could not find a plugin tag with name ignition::gazebo. Levels and distributed simulation will not work. After the CommsBroker Dbg messages, I get this: Unable to read [/home/subt-neil/subt_ws/install/share/subt_ign/worlds/virtual_stix.dot] file I also see this warning: [Wrn] [LevelManager.cc:737] Attempting to set performer with name [X1] , but the entity could not be found. Another attempt will be made in the next iteration. I can provide the whole console output, but I don’t see a way to attach a document to a reply (maybe you can only attach when you create an issue?) |
|
Original comment by Hector Escobar (Bitbucket: hector_escobar). Hi @alfredo Bencomo, I did an install using docker and I get similar problems as described by everyone else.
source /opt/ros/melodic/setup.bash source ~/subt_ws/install/setup.bash cd ~/subt_ws/ ign launch -v 4 virtual_stix.ign robotName1:=X1 robotConfig1:=X1_SENSOR_CONFIG_1 robotName2:=X2 robotConfig2:=X2_SENSOR_CONFIG_1 robotName3:=X3 robotConfig3:=X3_SENSOR_CONFIG_1 robotName4:=X4 robotConfig4:=X4_SENSOR_CONFIG_1 Then the world gets loaded but no robots. And I see the following errors: [Err] [LevelManager.cc:134] Could not find a plugin tag with name ignition::gazebo. Levels and distributed simulation will not work. Unable to read [/home/developer/subt_ws/install/share/subt_ign/worlds/virtual_stix.dot] file and the following shows 3 times [Err] [GazeboFactory.cc:175] Factory service call timed out. |
|
Original comment by Sarah Kitchen (Bitbucket: snkitche). I too was having problems similar to Neil - world launched, robots appeared, teleop with the game remote did not work (“Shutting down process monitor…”). I was able to resolve the installation dependencies myself, but haven’t tried the newest instructions yet (last attempt was about 10 days ago). I was using the catkin instructions. Can you guys update your wiki with guidelines on converting .launch to .ign files? Specifically the Team Configuration page? |
|
Original comment by Alfredo Bencomo (Bitbucket: bencomo). Restart you machine and try again with just one vehicle. It'll still show the [Err] [LevelManager.cc:134] and [Err] [VisibilityTable.cc:57] messages on the console, so ignore those for now.
|
|
Original comment by Neil Johnson (Bitbucket: realdealneil1980). Alfredo Bencomo (bencomo) That seems to work a lot better! We are able to launch a single agent (we have tried X1 and X4). We don’t currently get any video coming from the /X1/rgbd_camera/image_raw topic. Does that work for you? Was the problem above only happening due to launching multiple agents? Will that be addressed soon? |
|
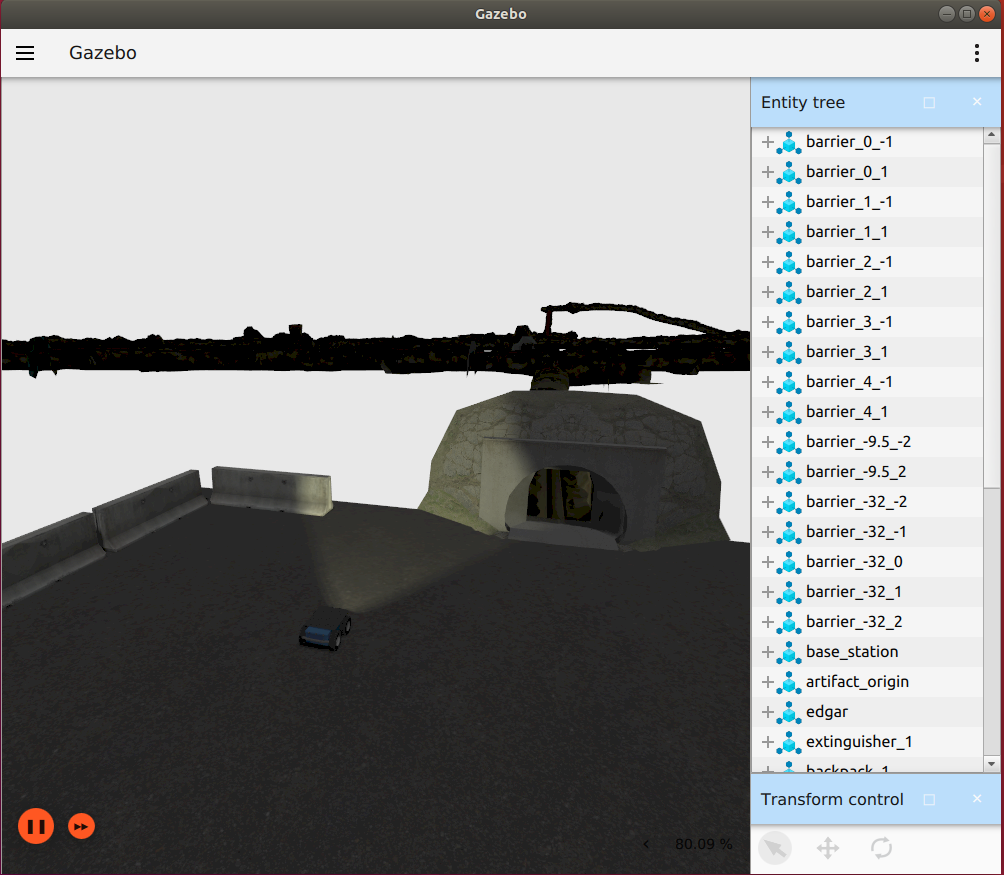
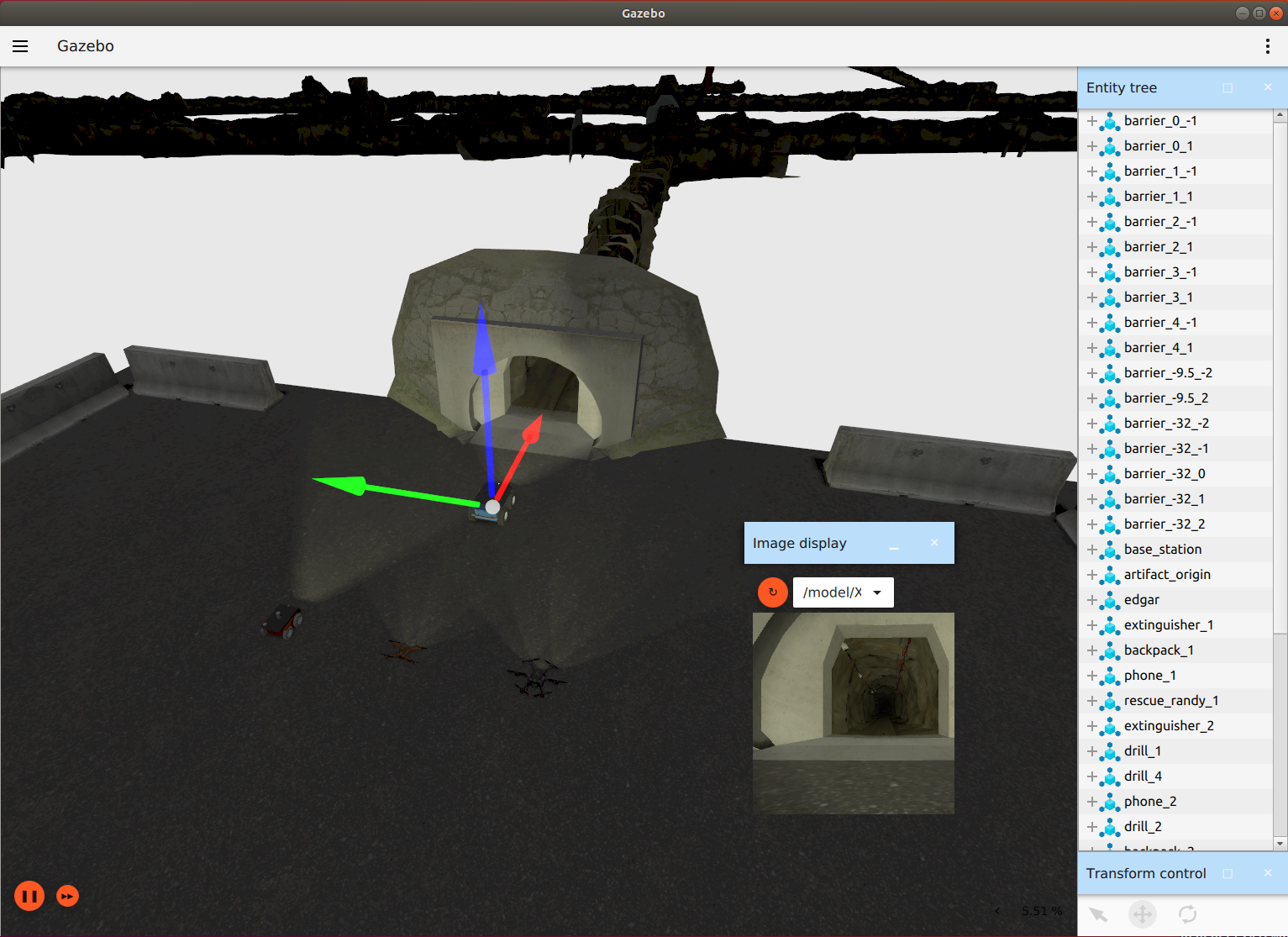
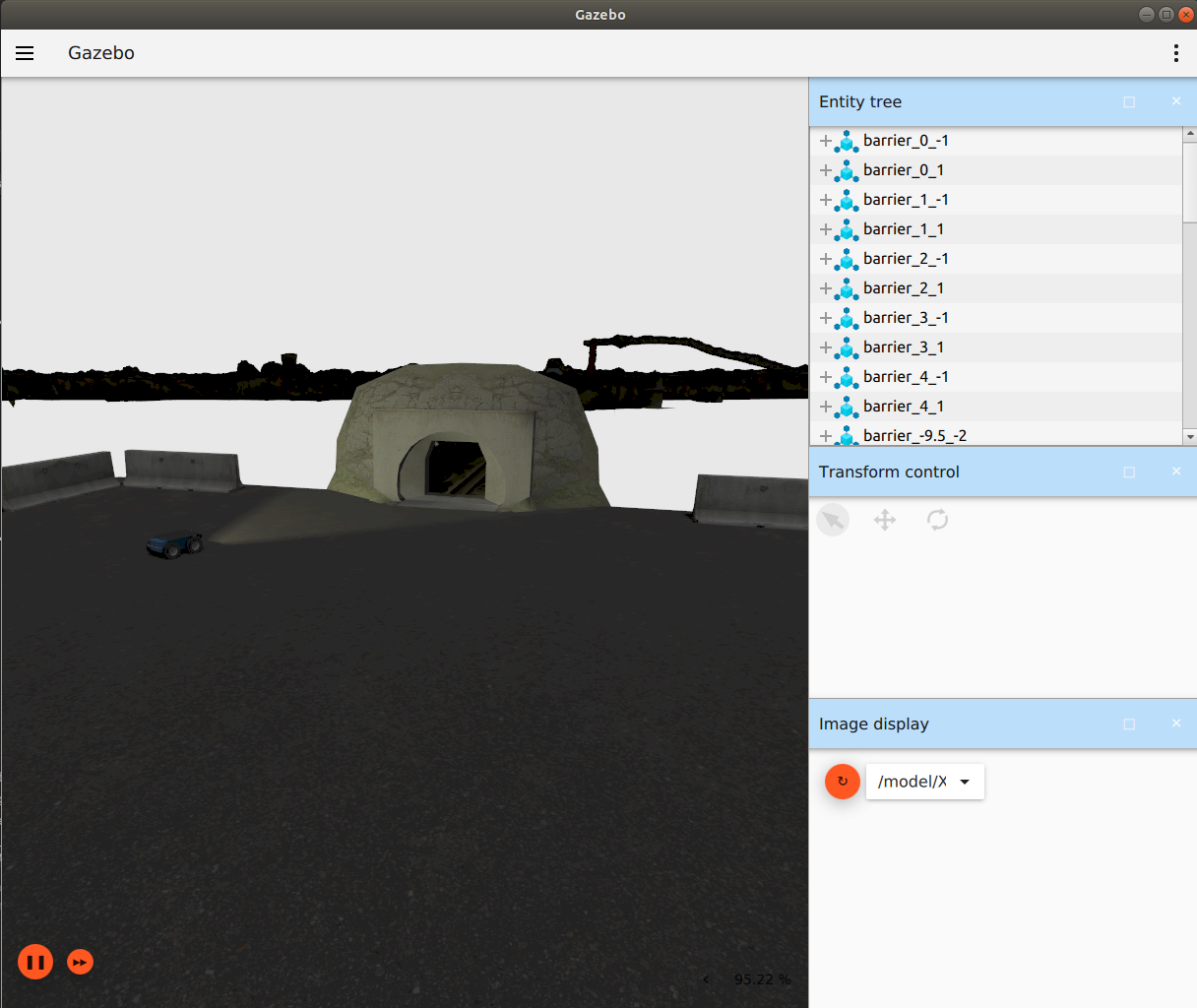
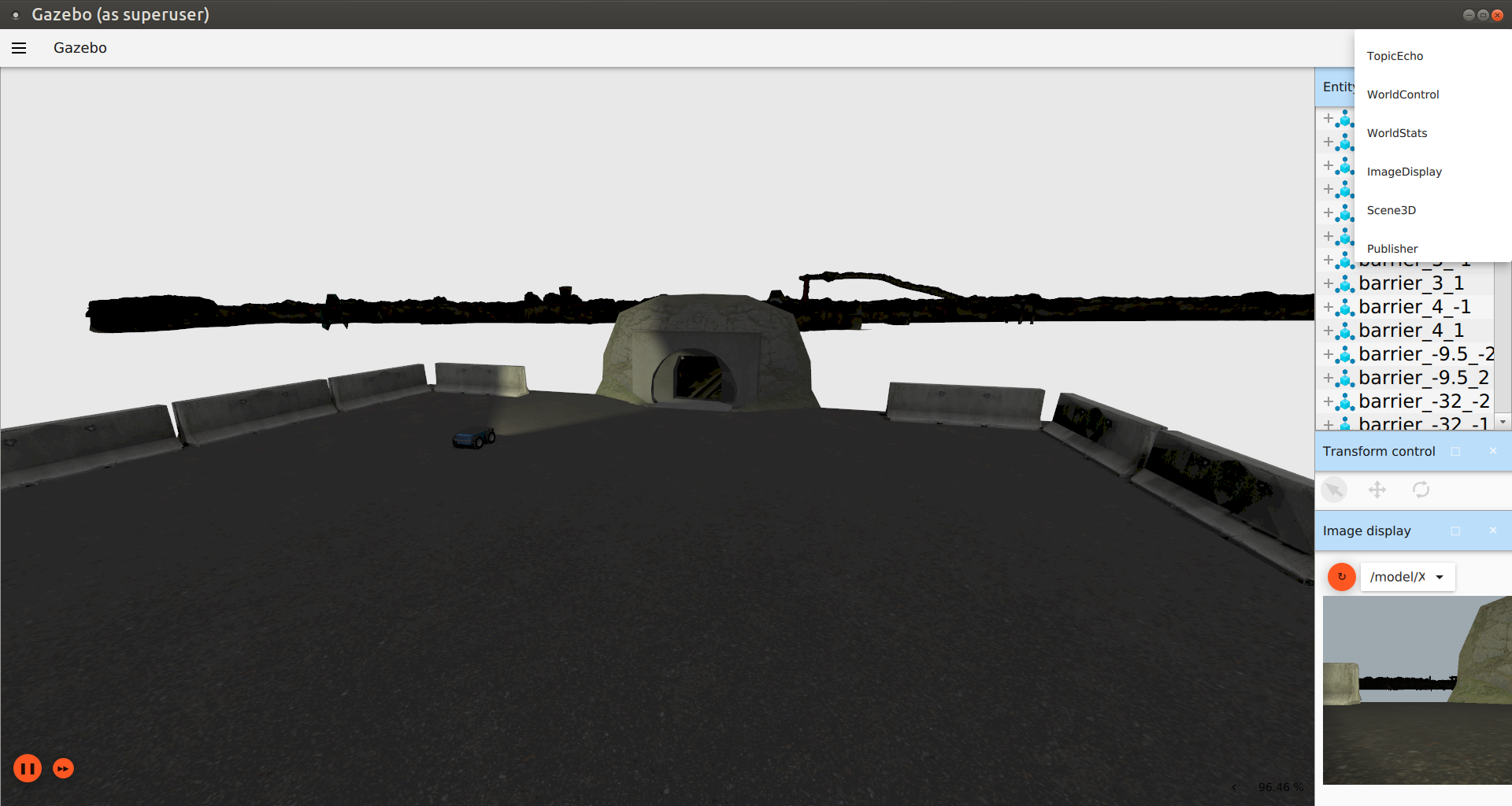
Original comment by Alfredo Bencomo (Bitbucket: bencomo). Neil, I’m glad you are now able to launch at least a single agent. I do get video from the agent’s camera (see X1 below), if that is what you meant. Are you selecting the ImageDisplay option from the drop-down top menu? Regarding launching multiple agents, we are addressing that right now. As a matter of fact, I’m testing with four agents as you can see below. I’ll post an update later. |
|
Original comment by Alfredo Bencomo (Bitbucket: bencomo). Neil, my colleague Addisu, actually pointed out that you are probably looking for video feed from RGBD cameras, which he is currently reviewing. Here is the PR for your reference: |
|
Original comment by Derek Knowles (Bitbucket: dknowles-ssci). Alfredo Bencomo (bencomo) I've gotten to the same point as Neil. Running the command
|
|
Original comment by Alfredo Bencomo (Bitbucket: bencomo). Derek Knowles (dknowles-ssci) do you get these messages on the console? [Err] [SceneManager.cc:111] Parent entity with Id: [1] not found. Not adding model visual with ID[254] and name [X1] to the rendering scene. |
|
Original comment by Martin Dlouhy (Bitbucket: robotikacz). I am still stuck at but it seems that it is my local problem. Before I run “sudo apt-get remove ignition-blueprint”, removed old “subt_ws” (there was pointing old gazebo .bash init, so it had sense) and rebooted … I suppose that I have to clear all caches?? |
|
Original comment by Alfredo Bencomo (Bitbucket: bencomo). Martin Dlouhy (robotikacz) Run these commands before you run the > sudo apt-get install build-essential cmake … … |
|
Original comment by Hector Escobar (Bitbucket: hector_escobar). I got to the point where Neil and Derek are. I do get images in the /X1/front/image_raw but only through another terminal running rqt. None of the vehicle configurations seem to have an RGBD camera yet. I don’t seem to be able to find the Image Display window or option to pop display it in Gazebo. |
|
Original comment by Hector Escobar (Bitbucket: hector_escobar). I am able to display with the Image Display window. The scroll bar doesn’t work for me, only the scroll with the mouse so the option was hidden. |
|
Original comment by Derek Knowles (Bitbucket: dknowles-ssci). Alfredo Bencomo (bencomo) Yes, similar ones. I did a fresh subt_ws install this morning and got the same errors. I first get the below errors that have already been mentioned: # Near the start
[Err] [LevelManager.cc:134] Could not find a plugin tag with name ignition::gazebo. Levels and distributed simulation will not work
# And later
[Err] [VisibilityTable.cc:57] Unable to populate visibility graph using path[/home/subt-derek/subt_ws/install/share/subt_ign/worlds/virtual_stix.dot]
[Err] [VisibilityRfModel.cc:36] Unable to load visibility table data filesAnd then later SceneManager errors: [Err] [SceneManager.cc:108] Parent entity with Id: [1] not found. Not adding model: [254]
[Err] [SceneManager.cc:148] Parent entity with Id: [254] not found. Not adding link: [255]
[Err] [SceneManager.cc:148] Parent entity with Id: [254] not found. Not adding link: [281]
[Err] [SceneManager.cc:148] Parent entity with Id: [254] not found. Not adding link: [284]
[Err] [SceneManager.cc:148] Parent entity with Id: [254] not found. Not adding link: [287]
[Err] [SceneManager.cc:148] Parent entity with Id: [254] not found. Not adding link: [290]
[Err] [SceneManager.cc:186] Parent entity with Id: [255] not found. Not adding visual: [256]
[Err] [SceneManager.cc:186] Parent entity with Id: [255] not found. Not adding visual: [257]
[Err] [SceneManager.cc:186] Parent entity with Id: [255] not found. Not adding visual: [258]
[Err] [SceneManager.cc:186] Parent entity with Id: [255] not found. Not adding visual: [259]
[Err] [SceneManager.cc:186] Parent entity with Id: [255] not found. Not adding visual: [260]
[Err] [SceneManager.cc:186] Parent entity with Id: [255] not found. Not adding visual: [261]
[Err] [SceneManager.cc:186] Parent entity with Id: [255] not found. Not adding visual: [262]
[Err] [SceneManager.cc:186] Parent entity with Id: [255] not found. Not adding visual: [263]
[Err] [SceneManager.cc:186] Parent entity with Id: [255] not found. Not adding visual: [264]
[Err] [SceneManager.cc:186] Parent entity with Id: [255] not found. Not adding visual: [265]
[Err] [SceneManager.cc:186] Parent entity with Id: [255] not found. Not adding visual: [266]
[Err] [SceneManager.cc:186] Parent entity with Id: [255] not found. Not adding visual: [267]
[Err] [SceneManager.cc:186] Parent entity with Id: [255] not found. Not adding visual: [268]
[Err] [SceneManager.cc:186] Parent entity with Id: [255] not found. Not adding visual: [269]
[Err] [SceneManager.cc:186] Parent entity with Id: [281] not found. Not adding visual: [282]
[Err] [SceneManager.cc:186] Parent entity with Id: [284] not found. Not adding visual: [285]
[Err] [SceneManager.cc:186] Parent entity with Id: [287] not found. Not adding visual: [288]
[Err] [SceneManager.cc:186] Parent entity with Id: [290] not found. Not adding visual: [291]
[Err] [SceneManager.cc:441] Parent entity with Id: [255] not found. Not adding light: [274]
[Err] [SceneManager.cc:441] Parent entity with Id: [255] not found. Not adding light: [275]
[Err] [SceneManager.cc:441] Parent entity with Id: [255] not found. Not adding light: [276]
[Err] [SceneManager.cc:441] Parent entity with Id: [255] not found. Not adding light: [277]
[Err] [RenderUtil.cc:267] Failed to create sensor for entity [279]. Parent not found.
[Err] [RenderUtil.cc:267] Failed to create sensor for entity [280]. Parent not found. |
|
Original comment by Alfredo Bencomo (Bitbucket: bencomo). Hi everyone, Several ignition packages have been updated the last few days. Therefore, the fastest way to get everyone with the latest stable code-base, it’s to just execute the commands below again: After that, just open one single Terminal window and you should be able to spawn four vehicles/agents suing these commands:
|
|
Original comment by Hector Escobar (Bitbucket: hector_escobar). That worked for me and I am able to spawn and move the 4 vehicles around. The control is not exactly mapped as you describe in the ExampleSetup. The lights are not mapped and the controls for the drone are not quite right but I guess we can work with it. Thanks, Hector. |
|
Original comment by Alfredo Bencomo (Bitbucket: bencomo). Hector, I’m glad it's now working for you. Regarding the controller, we’re going to update the content of the Example Setup page to explain how to configure the Logitech F310 or other controllers. Currently, the PS3 controller is the one set as the default. |
|
Original comment by Adam Uccello (Bitbucket: uccellap). Hi Alfredo, I am able to launch a robot and control it with the joystick (although it’s quite slow). However, none of the laser scan data is showing up. The IGN output claims its publishing it: [Msg] Publishing laser scans on [/model/X2/front_scan] But rostopic doesn’t show it: developer@docker:~/subt_ws/src/subt/subt_ign/launch$ rostopic list Is that expected to be working at this point? If not, do you have any idea when it might be available? Thanks! |
|
Original comment by Alfredo Bencomo (Bitbucket: bencomo). Hi Adam, Laser scans will be added to the launch configuration very soon. In the meantime, just add this node into your …/subt_ros/launch/vehicle_topics.launch file. |
|
Original comment by Jon Fink (Bitbucket: jonfink-arl). Thanks Alfredo, that snippet added to vehicle_topics.launch was able to get me laser scan data. This raises two additional questions:
|
|
Original comment by Arthur Schang (Bitbucket: Arthur Schang). Check out issue #77. The data type is actually sensor_msgs::LaserScan as opposed to sensor_msgs::PointCloud2. That should work to get 3D data in a format you will be not very pleased with. |
|
Original comment by Alfredo Bencomo (Bitbucket: bencomo). Hi Jon, 3D LiDAR is in progress right now. It should be available/merged sometime next week. I’ll keep you posted.
I also noticed the ‘virtual_stix' prefix when I was testing with Rviz. We’re gonna look into that. Thank you for pointing that out as well. |
|
Original comment by Nate Koenig (Bitbucket: Nathan Koenig).
|
|
Original comment by Alfredo Bencomo (Bitbucket: bencomo).
Neil, I'm resolving this issue since you and other are now able to launch the sim with agents. |
|
Original comment by Sarah Kitchen (Bitbucket: snkitche). I’m not sure this issue should be marked as resolved yet. I was following this thread last week and eventually able to launch and teleoperate agents with ign launch team.ign. I just pulled the current subt master and am running into problems with launching and operating the agents again. Issues include (in no particular order):
|
|
Original comment by Alfredo Bencomo (Bitbucket: bencomo). Sarah Kitchen (snkitche) Would you mind opening a separate issue for that? e.g. “Launching Image Display causes the Ignition GUI to shutdown” . Thanks! |
|
Original comment by Alfredo Bencomo (Bitbucket: bencomo). Thank you, Sarah. We will triage yours soon and provide you with an update. Cheers! |
|
Original comment by Alfredo Bencomo (Bitbucket: bencomo).
|
Original report (archived issue) by Neil Johnson (Bitbucket: realdealneil1980).
The original report had attachments: error.log
We have been trying for the last two weeks to get the new version of the subt simulator working (ignition). We have tried on many different machines, and so far, we cannot figure out how to connect to the agents and drive them around in the team.ign file. Has anyone gotten this working on the new ignition system? It appears that the effort to get our system ported from the gazebo9 system to the ignition system is going to quite burdensome, but we can’t even start that yet because the simulator doesn’t run for us.
The text was updated successfully, but these errors were encountered: