Robots purpose is to simply try to keep itself up. When pushed, it will also slow down the gained speed.
Required:
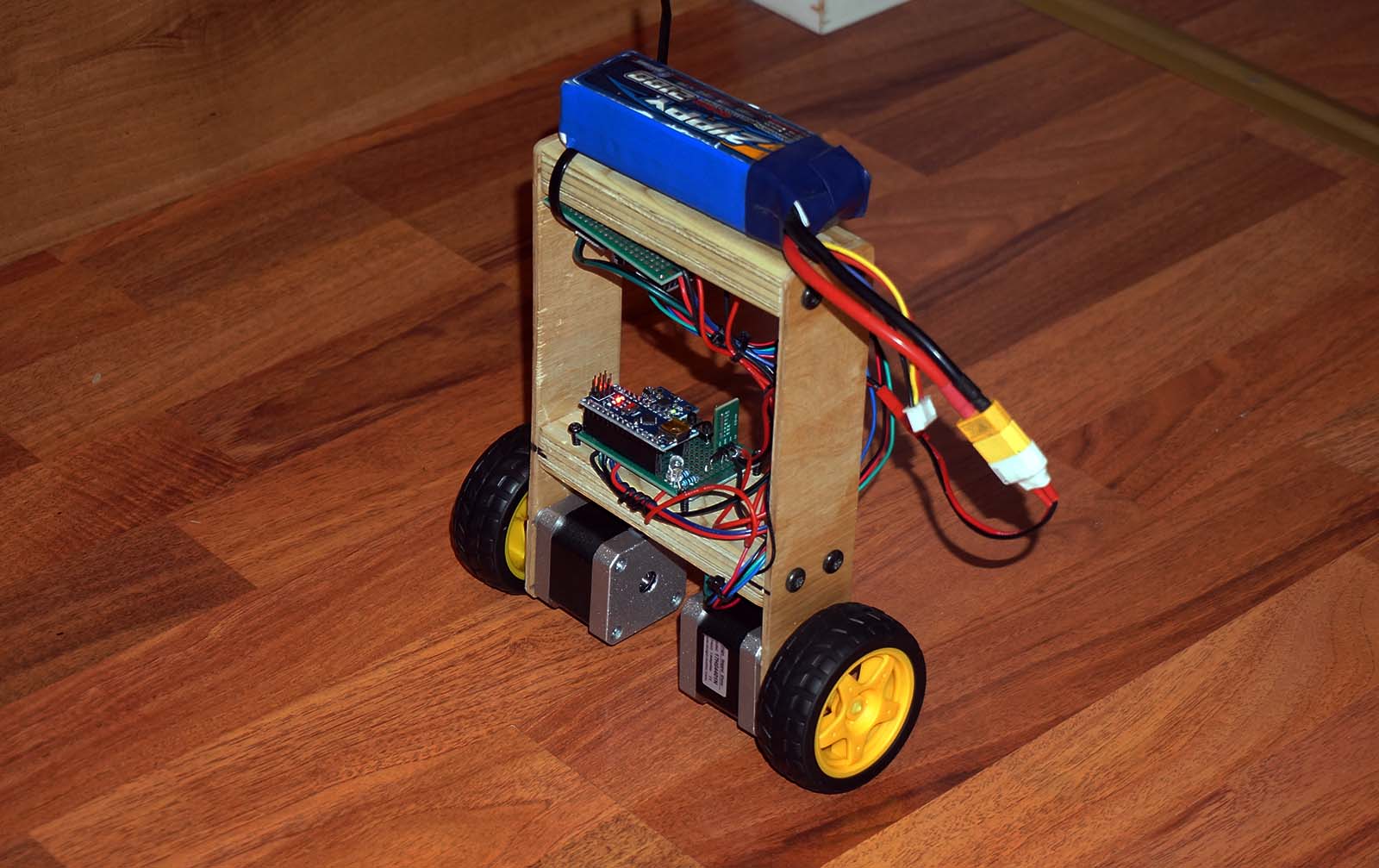
- 1x Arduino Nano
- 2x DRV8825 Stepper motor driver
- 2x Nema 17 Stepper motor
- 1x MPU6050 Gyroscope / accelerometer
- 1x Stepdown voltage regulator
- 2x 100uF 50V Capacitor for DRV8825 to eliminate IC voltage spikes
- 1x 11.1V 2100mAh Li-Po battery
- 2x Tires
- 1x Frame
Optional:
- 1x RGB LED
- 2x 220 ohm resistor for the LED
- 2x Buttons for PID adjustment / mode changing / whatever
- D2 to left motor pulse
- D3 to left motor direction
- D4 to right motor pulse
- D5 to right motor direction
- D8 to RGB LED green pin
- D9 to RGB LED red pin
- D11 to button 1
- D12 to button 2