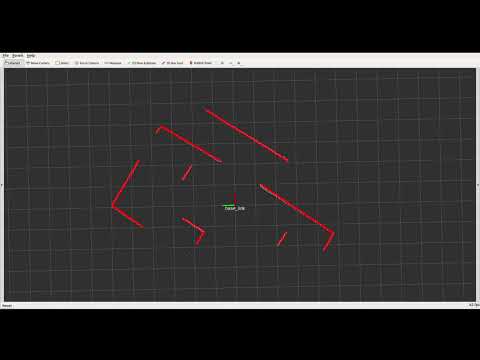
Line segment extraction from ROS LaserScan using Douglas-Peucker algorithm.
- Used simplify from Boost library for the Douglas-Peucker algorithm.
- Used laser_geometry for converting LaserScan to PointCloud.
- Used visualization_msgs/Marker for visualization.
Youtube Link: https://www.youtube.com/watch?v=EF6ovIfM_Ug
$ roslaunch extract_line_segments start.launch~douglas_pecker_distance (double, default: 0.1)
Distance parameter in the Douglas-Peucker algorithm. Too high values lead to less but inaccurate line segments, too low values lead to many and small line segments.
~neighbor_distance (double, default: 0.5)
Maximum distance constraint in meters to add points into the same cluster.
~min_cluster_size (int, default: 5)
The minimum number of points required to allow for the cluster to be processed.