GRID is a platform for rapid infusion of safe intelligence into robotic platforms built by Scaled Foundations.
GRID aims to be a platform for rapid prototyping of AI capabilities for robotics through foundation models and simulation. At the core of GRID is a Foundation Mosaic, a combination of several foundation models for perception, state estimation, safety, and control. An orchestration and reasoning layer powered by large language models allows for natural interaction and makes use of the underlying models to solve complex robotics tasks. GRID makes use of AirGen, a state of the art aerial robotics simulator for data generation and evaluation. This modular design enables various deep ML components and existing foundation models to be easily usable in a wider variety of robot-centric problems. To know more about our vision and technology, please read our technical report.

GRID is currently composed of :
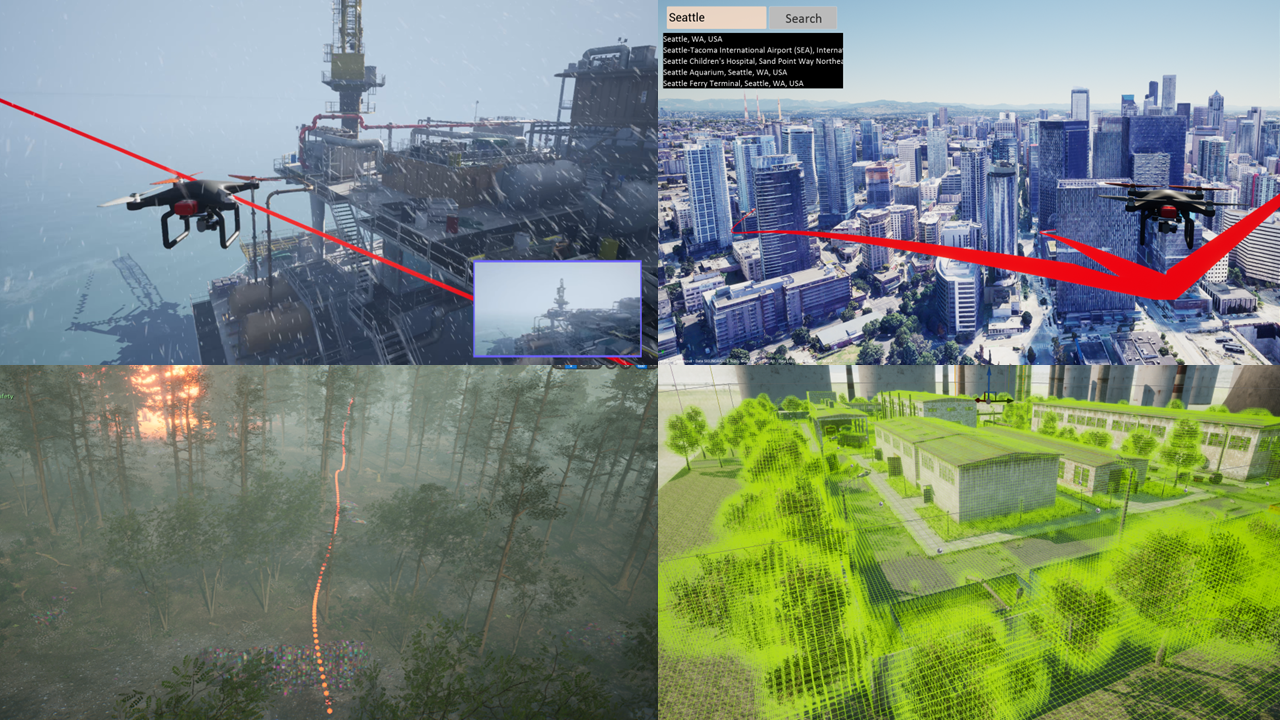
- AirGen - a high-fidelity simulator for aerial robotics with rich synthetic as well as geographic environments and multimodal sensing.
- Foundation Models - a collection of state-of-the-art models in perception, control, safety etc.
- Large Language Model - GPT-4 integration for natural language interaction, orchestration, reasoning, and code generation.
The usage of GRID is governed by the Responsible AI License. GRID is free to use for non-commercial research purposes. If you find our work useful in your research, please cite us as:
@techreport{vemprala2023grid,
title={GRID: A Platform for General Robot Intelligence Development},
author={Sai Vemprala and Shuhang Chen and Abhinav Shukla and Dinesh Narayanan and Ashish Kapoor},
year={2023},
eprint={2310.00887},
archivePrefix={arXiv},
primaryClass={cs.RO}
}
The GRID platform is currently in alpha, and is continuously evolving. We will be constantly adding new features and sample scripts, so please keep an eye out for updates!
To get started with GRID + AirGen, please visit our User Portal and create an account. For academic users, please sign up with your academic email address (.edu, .ac.* etc.) for unrestricted access to our platform. Visit our getting started start doc page for full setup instructions.
Simulation plays a central role in GRID for data generation, evaluation, and feedback. The AirGen simulator is a high-fidelity aerial robotics simulator built on top of AirSim. AirGen is capable of simulating a wide variety of scenes (both synthetic and geospatial) and generating data composed of a rich collection of sensor modalities. AirGen allows for large scale data generation in a wide variety of environments.
We try to set up and solve several robotics related scenarios using GRID. We posit that the rich collection of models within GRID, coupled with the effective copilot-like behavior of LLMs allows for very rapid prototyping of robot intelligence that is deployable.
- Wildfire search and rescue

- Vision-based landing

- Infrastructure inspection

- Safe navigation using time-to-collision
