ROS Bridge connects but throws an error: unknown error handler name 'rosmsg' #348
Comments
|
Hello @yohannes-taye , I have searched this issue on web, it seems like this issue is related to your ROS environment on your Ubuntu. Here are some suggestions that I found;
I hope this helps. |
|
Thank you so much @berkayalpcakal!! That fixed my issue :) |
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
Here is my problem:
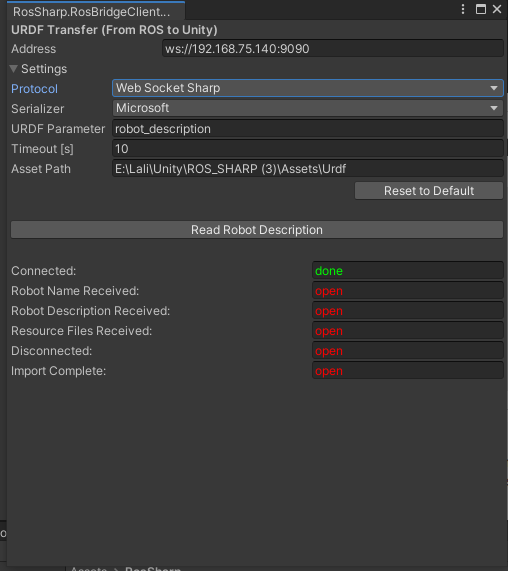
I have Ubuntu 14 setup on a VM and Unity 2019.4 on Windows. I have cloned the repo and started following the tutorials. Everything went well with setting up ROS, Turtle bot, and Gazebo. It worked till I reached the part of the tutorial 2.1 Transfer URDF from ROS to Unity. On the Unity side, this is what I get
While on the ros side it shows the following error
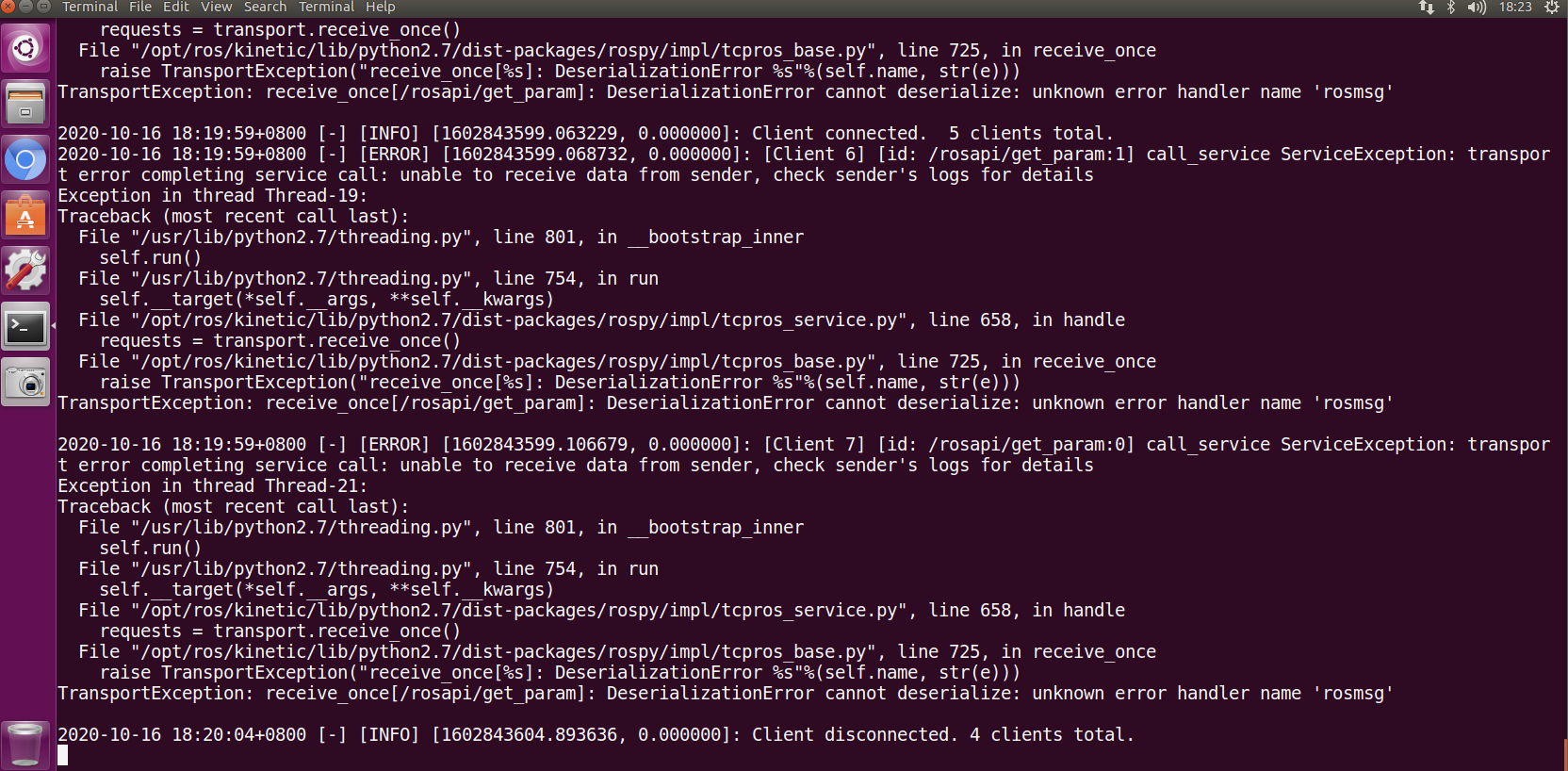
At this point, I'm stuck and don't know what else to try. I have looked at several of the issues on this repo, tried the proposed solutions but the issue still persists.
The text was updated successfully, but these errors were encountered: