| title |
|---|
MaixPy UART 串口使用介绍 |
串口是一种通信方式,包含了硬件和通信协议的定义。
- 硬件包括:
- 3 个引脚:
GND,RX,TX,通信双发交叉连接 RX TX, 即一方 TX 发送到另一方的 RX, 双方 GND 连接到一起。 - 控制器,一般在芯片内部,也叫 UART 外设,一般一个芯片有一个或者多个 UART 控制器,每个控制器有相对应的引脚。
- 3 个引脚:
- 通信协议: 为了让双方能顺利通信,规定了一套协议,具体可以自行学习,常见的参数有 波特率 校验位等,波特率是我们用得最多的参数。
通过板子的串口,可以和其它单片机或者 SOC 进行数据通信,比如可以在 MaixCAM 上实现人体检测功能,检测到坐标后通过串口发送给 STM32 单片机。
对于 MaixCAM 默认从 USB 口引出了一个串口,可以插上配套的 Type-C 转接小板,就能直接使用上面的串口引脚,
也可以不用转接板,直接使用板子上的 A16(TX) 和 A17(RX)引脚, 和 USB 口引出的是同样的引脚,是等效的。
对于 MaixCAM 使用 USB 引出的串口时需要注意,Typc-C 正插和反插,转接小板上的 RX 和 TX会交换,所以当你发现无法通信时,有可能就是 RX TX 反了,可以尝试将 Type-C 翻转一面插再看看通信是否正常。这个算是设计缺陷,不过一般也不会经常拔插所以适应一下也能接受。
将两个通信的板子双方连接好后(通信双发交叉连接 RX TX, 即一方 TX 发送到另一方的 RX, 双方 GND 连接到一起),就可以使用软件了。
通过 MaixPy 使用串口很简单:
from maix import uart
devices = uart.list_devices()
serial = uart.UART(devices[0], 115200)
serial.write_str("hello world")
print("received:", serial.read(timeout = 2000))先列出了系统的所有串口设备,然后这里使用了第一个,也就是上面说的 Type-C 出 引出的串口。
更多串口的 API 请看 UART API 文档
这里使用了write_str函数来发送字符串,在Python中有str和bytes两种基础数据类型,前者是字符串,后者是原始字节数据,比如:
"A"调用encode()方法变成b"A",反过来b"A"调用decode()方法变成"A"。str没法显示一些不可见字符比如 ASCII 码中的值0,在字符串中也是\0一般作为结束符,在bytes类型中就可以用b"\x00"来储存。- 对于非 ASCII 编码的字符串更有用,比如
UTF-8编码中中文好是由三个字节\xe5\xa5\xbd来表示的,我们可以通过"好".encode("utf-8")得到b"\xe5\xa5\xbd",也可以通过b'\xe5\xa5\xbd'.decode("utf-8)得到"好"。
所以如果我们需要发送字节数据,则用write()方法发送即可。
所以对于 str 类型,也可以不用write_str,而是使用serial.write(str_content.encode()) 来发送。
另外如果你有一个 list 类型的数据,可以通过bytes()方法来构建一个bytes对象,比如
a = [1, 2, 3]
serial.write(bytes(a))同样,read方法获得的数据也是bytes类型。
from maix import app, uart, time
import sys
device = "/dev/ttyS0"
serial0 = uart.UART(device, 115200)
serial0.write("hello 1\r\n".encode())
serial0.write_str("hello 2\r\n")
while not app.need_exit():
data = serial0.read()
if data:
print("Received, type: {}, len: {}, data: {}".format(type(data), len(data), data))
serial0.write(data)
time.sleep_ms(1) # sleep 1ms to make CPU free另外,这里循环里面加了一个 sleep_ms 是简单地释放一下 CPU,以达到程序不会占满 CPU 的效果,当然也有其它方式,这种方式最简单粗暴。
每个引脚可能可以对应不同的外设功能,这也叫引脚复用,如下图,每个引脚对应了不同功能,比如A17引脚(板子的丝引标识)对应了GPIOA17 UART0_RX PWM5 这三种功能,默认是UART0_RX。
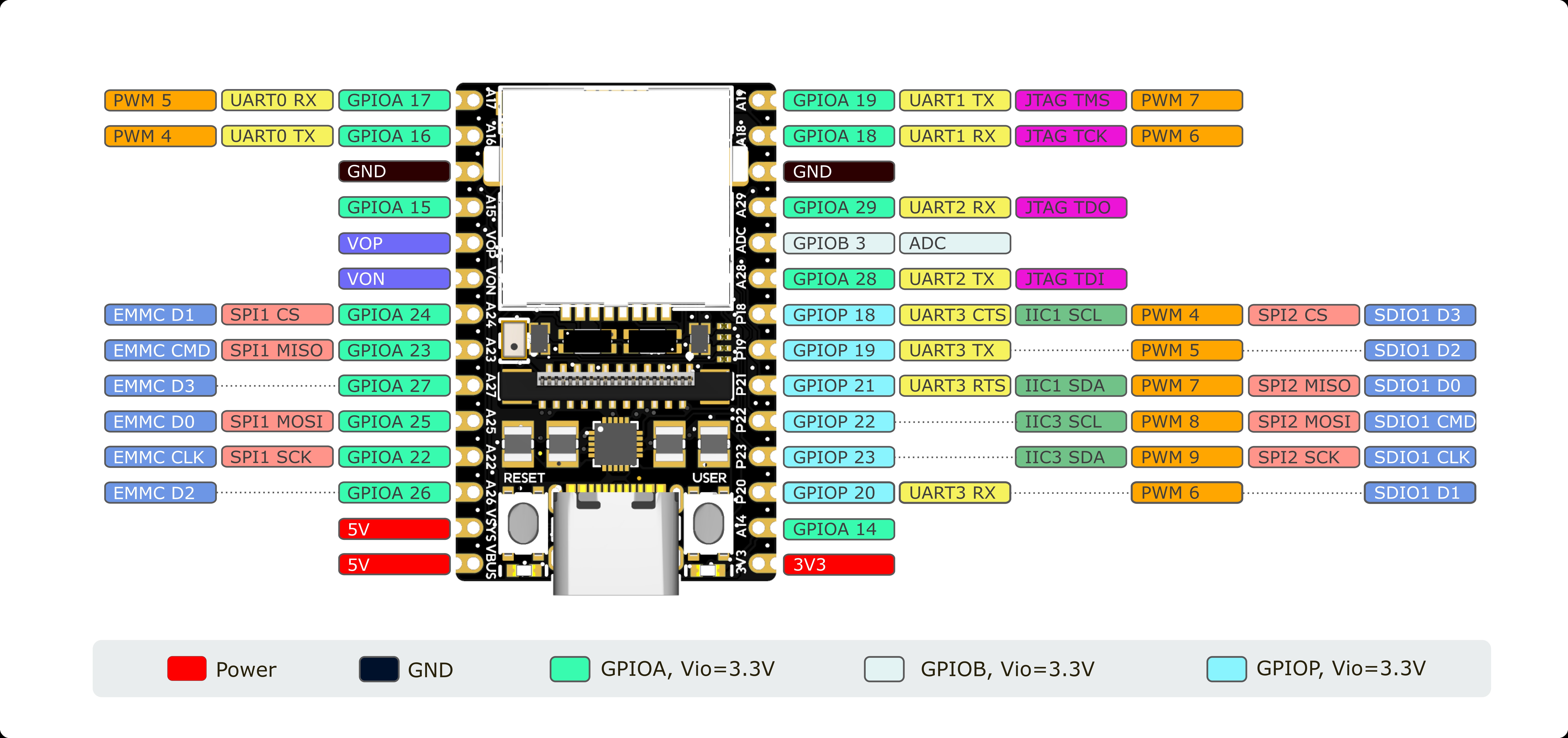
默认我们就能像上面直接使用UART0,对于其它串口的引脚默认都不是串口外设功能,所以要使用其它串口,需要先设置一下映射,使用pinmap.set_pin_function来设置。
这里以使用UART1 为例,先设置引脚映射选择引脚功能为串口,然后设备编号使用/dev/ttyS1,注意uart.list_devices() 默认不会返回需要手动映射的串口,所以直接手动传参就可以了:
from maix import app, uart, pinmap, time
pinmap.set_pin_function("A18", "UART1_RX")
pinmap.set_pin_function("A19", "UART1_TX")
device = "/dev/ttyS1"
serial1 = uart.UART(device, 115200)基于串口,你可以按照你自己的习惯进行通信,直接发字符串结果,或者可以结合Python的struct库进行编码成二进制协议。
另外 MaixPy 也内置了一个通信协议可以直接使用。
这里的通信协议即:规定通信双方的以什么样的格式来传输内容,方便双方解析识别信息,是一个二进制协议,包括帧头、数据内容、校验等。 完整的协议定义在 Maix 串口通信协议标准。 没有接触过通信协议可能看起来有点困难,结合下面的例子多看几遍就能理解了。
比如我们现在有一个物体检测,我们想检测到物体后通过串口发送给其它设备(比如 STM32 单片机或者 Arduino 单片机),告诉其我们检测到了什么物体,坐标是多少。
完整的例程:MaixPy/examples/protocol/comm_protocol_yolov5.py
首先我们需要检测到物体,参考 yolov5 检测物体的例程即可,这里我们就省略其它细节,来看检测到的结果是什么样
while not app.need_exit():
img = cam.read()
objs = detector.detect(img, conf_th = 0.5, iou_th = 0.45)
for obj in objs:
img.draw_rect(obj.x, obj.y, obj.w, obj.h, color = image.COLOR_RED)
msg = f'{detector.labels[obj.class_id]}: {obj.score:.2f}'
img.draw_string(obj.x, obj.y, msg, color = image.COLOR_RED)
dis.show(img)可以看到objs是多个检测结果,这里在屏幕上进行画框了,我们也可以在这里想办法把结果通过串口发送出去。
这里我们不需要手动初始化串口,直接使用内置的maix.comm, maix.protocol模块,调用comm.CommProtoco会自动初始化串口,默认波特率是115200,串口协议的相关可以在设备系统设置->通信协议里面设置。
系统设置里面可能还有其它通信方式比如tcp,默认是uart,你也可以通过maix.app.get_sys_config_kv("comm", "method")来获取到当前设置的是不是uart。
from maix import comm, protocol, app
from maix.err import Err
import struct
def encode_objs(objs):
'''
encode objs info to bytes body for protocol
2B x(LE) + 2B y(LE) + 2B w(LE) + 2B h(LE) + 2B idx ...
'''
body = b""
for obj in objs:
body += struct.pack("<hhHHH", obj.x, obj.y, obj.w, obj.h, obj.class_id)
return body
APP_CMD_ECHO = 0x01
APP_CMD_DETECT_RES = 0x02
p = comm.CommProtocol(buff_size = 1024)
while not app.need_exit():
# ...
objs = detector.detect(img, conf_th = 0.5, iou_th = 0.45)
if len(objs) > 0:
body = encode_objs(objs)
p.report(APP_CMD_DETECT_RES, body)
# ...这里通过encode_objs函数将所有检测到的物体信息打包成bytes类型的数据,然后用p.report函数将结果发送出去。
这里我们对body内容进行了一个简单的定义,即2B x(LE) + 2B y(LE) + 2B w(LE) + 2B h(LE) + 2B idx ...,
含义是:
- 这张图中检测到多个物体,在
body中按顺序排列,每个目标占用2+2+2+2+2 = 10个字节的长度,一共有body_len / 10个物体。 - 第1、2个字节代表识别到的物体的左上角的
x坐标,单位是像素,因为 yolov5 的结果这个坐标值有可能为负数,所以我们用一个short类型的值来表示,这里使用了小端编码(LE)。
这里小端即数值的低字节在前,比如坐标
x为100, 十六进制为0x64,我们用两个字节的short来表示就是0x0064,这里小端编码成bytes就是0x64在前, 结果就是b'\x64\x00'。
- 同理,将后面的数据都依次编码,一个物体得到一个
10字节长的bytes类型数据。 - 循环将所有物体信息编码并拼接成一个
bytes。
在调用report函数时,底层会自动按照协议拼接上协议头、校验和等等,这是在另一端就能收到一帧完整的数据了。
在另一端收到信息后也要按照协议进行解码,如果接收端也是用 MaixPy 可以直接:
while not app.need_exit():
msg = p.get_msg()
if msg and msg.is_report and msg.cmd == APP_CMD_DETECT_RES:
print("receive objs:", decode_objs(msg.get_body()))
p.resp_ok(msg.cmd, b'1')如果是其它设备比如STM32或者Arduino则可以参考 Maix 串口通信协议标准 附录中的 C 语言函数进行编解码。