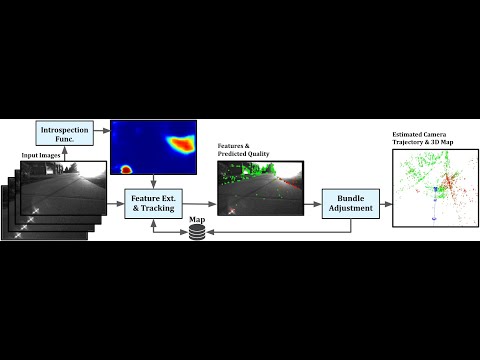
Introspective Vision for Simultaneous Localization and Mapping. This is an implementation of IV-SLAM for ORB-SLAM2.
- Pangolin
- OpenCV Version 2.4.3 and above.
- glog
- gflags
- Eigen3
- JsonCpp
- CUDA(≥ 10.2) and cuDNN (≥ 7.6.5)
Download and install Pangolin from here. You can install the rest of the dependencies on ubuntu using:
sudo apt-get install libgoogle-glog-dev libgflags-dev libjsoncpp-dev libeigen3-dev nvidia-cuda-toolkit
./install_dependencies.bash
cd introspective_ORB_SLAM
./build.sh
We use Pytorch for training the introspection function. Setting up a virtual environment using Conda is suggested. You can install the minimal installer for Conda from here. Then, create an environment using:
conda create -n ivslam-env python=3.7
conda activate ivslam-env
conda install pytorch torchvision cudatoolkit=10.2 -c pytorch
conda install -c conda-forge scikit-image pillow==6.2.1 yacs tqdm
conda install -c anaconda scikit-learn
conda install -c menpo opencv
Download a pre-trained model using:
./download_pretrained_models.bash
Download a short robot deployment session using:
./download_sample_data.bash
Run IV-SLAM using a pre-trained model on the downloaded data:
cd introspective_ORB_SLAM/scripts
./run_stereo_jackal_batch_inference.bash
GPU will be used if available, by default. The program has been tested with cuDNN v7.6.5 and CUDA 10.2.
When run in training mode, IV-SLAM evaluates extracted image features and generates the labelled data required for training the introspection function. Run IV-SLAM in training mode using the following script:
cd introspective_ORB_SLAM/scripts
./run_stereo_jackal_train_data_gen.bash
The implementation of IV_SLAM is closely linked to ORB_SLAM because of the need for book keeping required for image features and map points. In order to run default ORB-SLAM in the IV-SLAM package you should use the provided configuration scripts and not the tutorials found in ORB-SLAM2.
The provided example script run_stereo_jackal_batch_inference.bash found in introspective_ORB_SLAM/scripts should be edited to have the following lines in order to run basic ORB-SLAM for inference,
CREATE_IVSLAM_DATASET="false"
INFERENCE_MODE="true"
INTROSPECTION_FUNCTION_ENABLED="false"
MAP_DRAWER_VISUALIZE_GT_POSE="false"
In the YAML file jackal_visual_odom_stereo_inference.yaml make sure it contains the following lines,
IVSLAM.unsupervisedLearning: 0
ORBextractor.enableIntrospection: 0
Viewer.HeadlessMode: 0
Viewer.SaveFramesToFile: 0
Viewer.SaveMapDrawingsToFile: 0
Once labelled training data is generated, the introspection function, implemented as a fully convolutional network, can be trained using the following command:
conda activate ivslam-env
cd introspection_function/training/run_scripts
./exec_train_modular_jackal.bash
The path to the training data and the model architecture are provided in a config file that is passed to the training process in the above script.
In order to use the trained PyTorch model during inference, you should first export it to Torch Script using the following script:
conda activate ivslam-env
cd introspection_function/training/run_scripts
./exec_export_model_light.bash
Provide the path to the exported model in the execution script, in order for it to be loaded and used at run-time.
IV-SLAM currently operates on input data that is formatted the same as the KITTI dataset.
If you find this work useful in your research, please consider citing:
@inproceedings{rabiee2020ivslam,
title={IV-SLAM: Introspective Vision for Simultaneous Localization and Mapping},
author={Sadegh Rabiee and Joydeep Biswas},
booktitle={Conference on Robot Learning (CoRL)},
year={2020},
}