



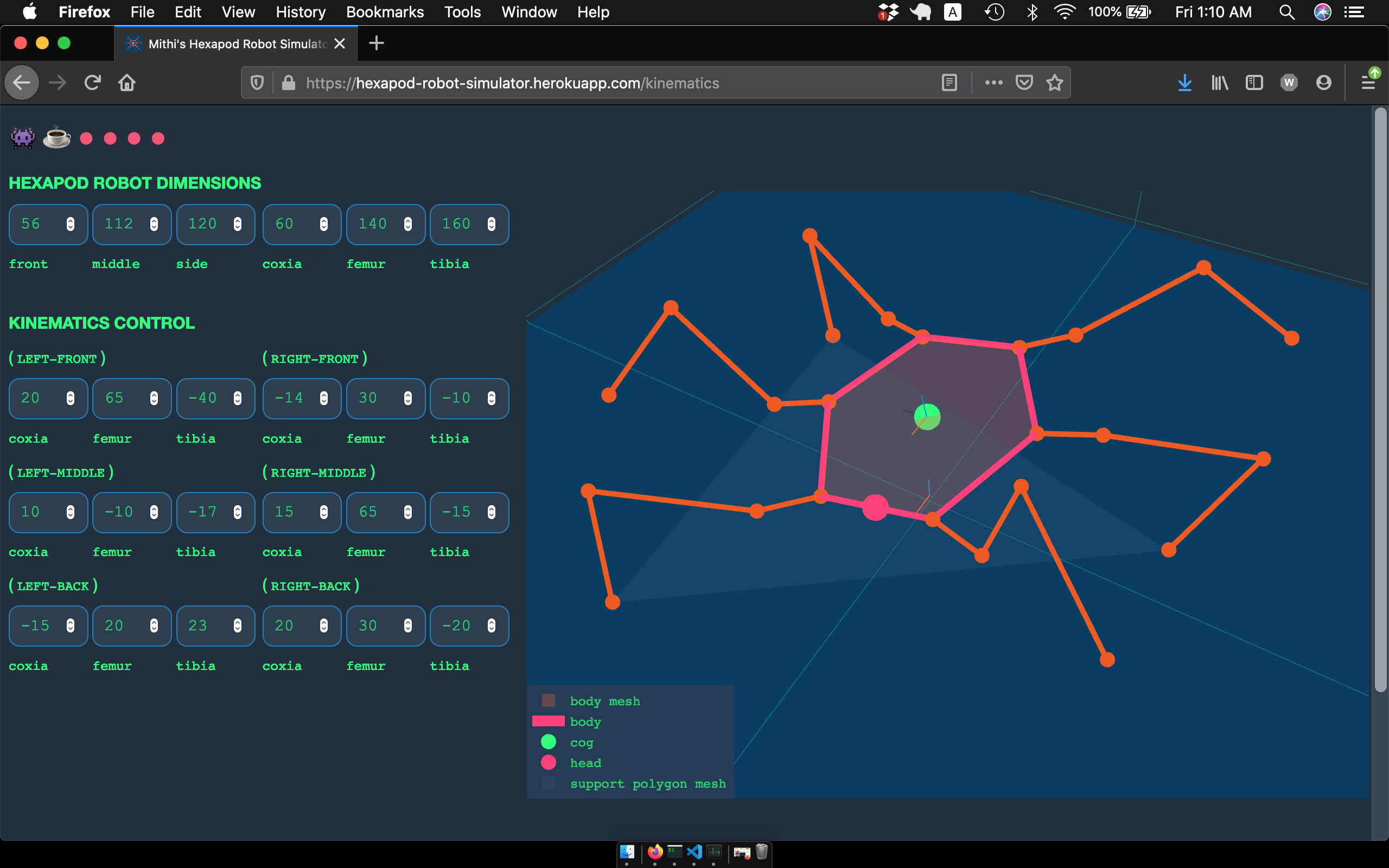
- A bare minimum browser-based hexapod robot simulator built from first principles 🕷️
- If you like this project, consider buying me a few ☕ cups of coffee. 💕
- Here's my rewrite in Javascript (WIP), a fully client-side app. I've also realized a lot of ways to improve the code in the process of rewriting, I'm planning to incorporate those learnings to this project as well, in the (hopefully near) future. While the functionality won't change, I'm planning to change the implementation significantly.
 |
 |
 |
 |
| STATUS | FEATURE | DESCRIPTION |
|---|---|---|
| 🎉 | Forward Kinematics | Given the angles of each joint, what does the robot look like? |
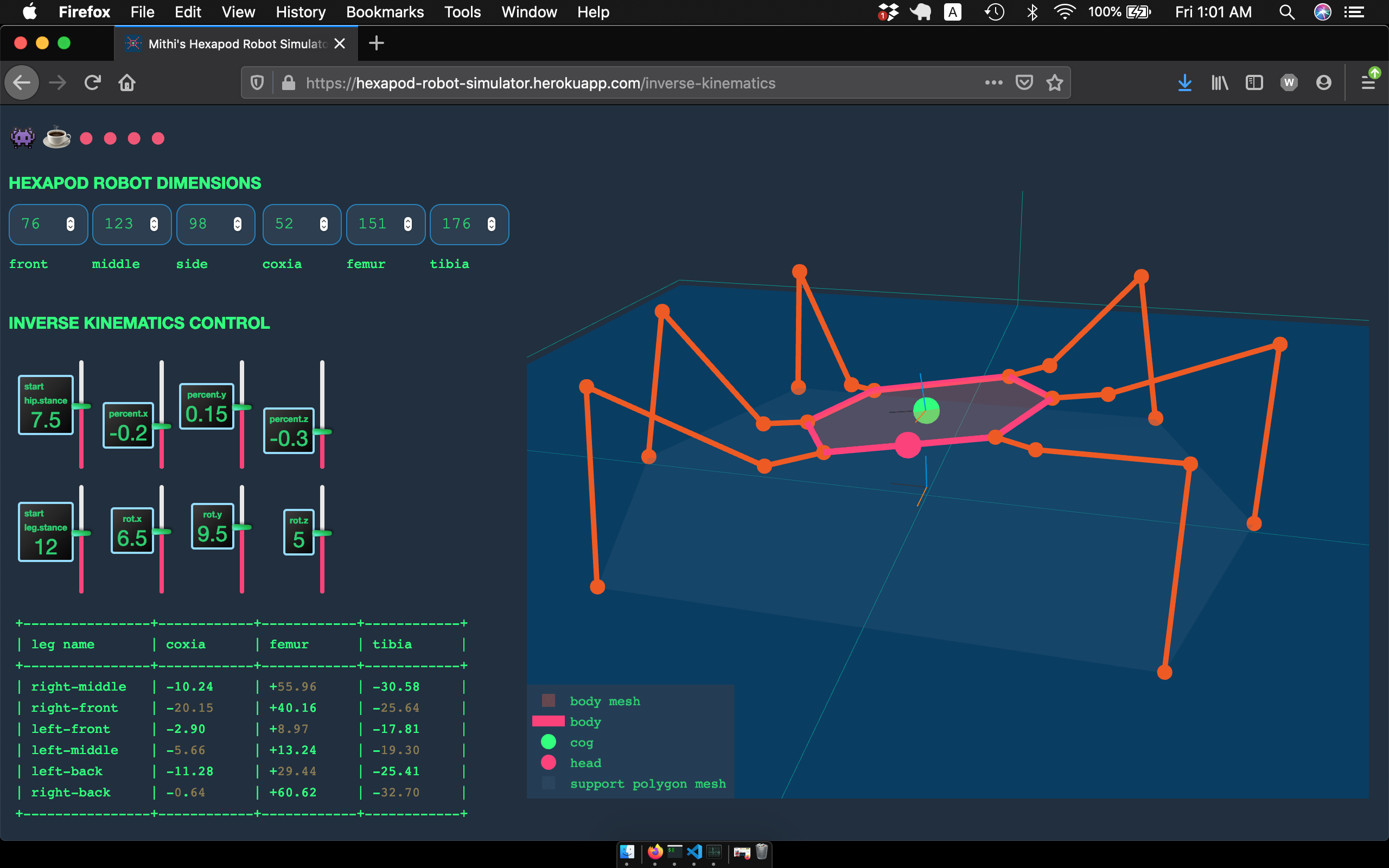
| 🎉 | Inverse Kinematics | What are the angles of each joint to make the robot look the way I want? Is it even possible? Why or why not? |
| 🎉 | Uniform Movements | If all of the legs behaved the same way, how will the hexapod robot as a whole behave? |
| 🎉 | Customizability | Set the dimensions and shape of the robot's body and legs. (6 parameters) |
| 🎉 | Usability | Control the camera view, pan, tilt, zoom, whatever. |
| 🎉 | Simplicity | Minimal dependencies. Depends solely on Numpy for calculations. Uses only Plotly Dash for plotting, Dash can be safely replaced if a better 3d plotting library is available. |
| ❗ | Stability Check (WIP) | If we pose the robot in a particular way, will it fall over? |
| ❗ | Fast | Okay, it's not as fast as I wanted, but when run locally, it's okay |
| ❗ | Bug-free | Fine, right now there's still room for improvement |
| ❗ | Well-tested | Yeah, I need to compile test cases first |
 |
 |
|---|---|
 |
 |
- Python 3.8.1
- Plotly Dash 1.10.0
- Plotly Dash Daq 0.4.0
- Numpy 1.18.1
- See also ./requirements.txt
$ python index.py
Running on http://127.0.0.1:8050/- Modify default settings with ./settings.py
- Dark Mode is the default - modify page styles with ./style_settings.py
 |
|---|
 |
- Definitions
- The Inverse Kinematics Algorithm used for this project
- How to find the orientation of the hexapod with respect to the ground given we know all the orientations of the six legs with respect to the robot's body.
- Algorithm 1 when we know which of the three points of each leg could contact the ground
- Algorithm 2 when we don't know which of points of which legs could be in contact with the ground
- How to make the hexapod step on the correct target ground contacts
- How to determine if the hexapod should twist and by how much
-
Now live on https://hexapod-robot-simulator.herokuapp.com ! BUT (and a big one) I highly suggest that you run it locally. When run locally, it's pretty speedy! On the other hand, the link above is barely usable.
-
This implementation uses matrices, NOT quaternions. I'm aware that quaternions is far superior in every single way. In the (un)forseeable future, maybe?
-
Honestly, my Inverse Kinematics algorithm and orientation algorithm is just something I came up with based on what I remember back in college plus browsing through the Mathematics Stack Exchange. It's just the most intuitive that I can think of. If you want something closer to the state-of-the-art, maybe checkout Unity's Fast IK or ROS IKFast.
-
Don't be mean!




