Releases: iNavFlight/inav
7.1.1
Hello and welcome to INAV 7.1.1 "Ferocious Falcon"
Please carefully read all of this document for the best possible experience and safety.
Contact other pilots, share experiences, suggestions and ask for help on:
| INAV Discord Server | |
| INAV Official on Facebook |
Important Notes
INAV 7 is the last INAV official release available for F411 based flight controllers. The next milestone, INAV 8 will not be available for F411 boards.
The GPS NMEA protocol is no longer supported. All pilots are required to switch to UBLOX protocol. All modern GPS modules (even as old as from 2015 and earlier) support UBLOX protocol and there is not a single good reason to stick to NMEA nowadays
Make sure to remove props and check your motor and servo outputs before powering your upgraded flight controller with a battery for the first time. The changes to enable flexible motor and servo allocation may change what outputs your configuration uses by default.
PosHold, Navigation and RTH without compass PSA
Attention all drone pilots and enthusiasts,
Are you ready to take your flights to new heights with INAV 7.1? We've got some important information to share with you.
INAV 7.1 brings an exciting update to navigation capabilities. Now, you can soar through the skies, navigate waypoints, and even return to home without relying on a compass. Yes, you heard that right! But before you launch into the air, there's something crucial to consider.
While INAV 7.1 may not require a compass for basic navigation functions, we strongly advise you to install one for optimal flight performance. Here's why:
🛰️ Better Flight Precision: A compass provides essential data for accurate navigation, ensuring smoother and more precise flight paths.
🌐 Enhanced Reliability: With a compass onboard, your drone can maintain stability even in challenging environments, low speeds and strong wind.
🚀 Minimize Risks: Although INAV 7.1 can get you where you need to go without a compass, flying without one may result in a bumpier ride and increased risk of drift or inaccurate positioning.
Remember, safety and efficiency are paramount when operating drones. By installing a compass, you're not just enhancing your flight experience, but also prioritizing safety for yourself and those around you.
So, before you take off on your next adventure, make sure to equip your drone with a compass. It's the smart choice for smoother flights and better navigation.
Fly safe, fly smart with INAV 7.1 and a compass by your side!
Currently, if you wish to fly a multirotor without a compass. You will need to enable a compass (fake is ok) to change navigational modes in Configurator. You should disable the compass after making the changes. This has been fixed for a future release.
Upgrading from a previous release
Upgrading from INAV 7.0 and 7.1
- Backup configuration with CLI
diff allcommand - Download and install the new INAV Configurator 7.1
- Flash INAV 7.1 WITH Full Chip Erase option enabled
- Select Keep current settings from the defaults pop-up
- Go to CLI and restore your 7.0 diff
- Done
Upgrading from INAV 6 and 6.1
- Download and install the new INAV Configurator 7
- Save to a file the current diff all from the CLI.
- Upgrade to INAV 7 using the Full Erase option in the configurator.
- In case of Analog FPV, upload your OSD font of choice from the OSD tab.
- Go to the CLI again and paste the above-described contents from the file you previously created and write save , press ENTER.
- There are many new, changed, and removed settings. Check carefully that the settings are correct and fix any unrecognized or out-of-range items from the saved configuration.
- You should be ready, explore new 7.0 features, and enjoy!
Upgrading from older versions
Please follow the instructions on this page.
Major changes
- No longer require MAGNETOMETER to allow setting GPS related flight modes on Multirotors - bear in mind, mag is still advised as it greatly increases PosHold/RTH performance
- No longer require BARO to allow setting AltHold and GPS related modes on Multirotors - bear in mind, baro is still advised as it greatly increases PosHold/RTH performance
Changelist
The full list of changes is available here
The full list of INAV Configurator changes is available here
What's Changed from INAV 7.1
- Add auto enabled flight modes to blackbox by @breadoven in #9950
- Cherry pick AOCODARCF4V3 target commit from master into 7.1.1 branch by @mmosca in #9954
- Cherry pick TAKERF722SE target from master by @mmosca in #9955
- Enable baro-less navigation by default by @DzikuVx in #9966
- Minor Nav code improvements by @breadoven in #9947
- FW Nav Auto Landing fixes by @breadoven in #9940
- Prevent high throttle auto cancelling OSD stats screen on disarm by @breadoven in #9951
- Fix macos builds in release_7.1.1 to fix builds by @mmosca in #9993
- Cherry pick flywoof745 fixes from master by @mmosca in #9991
- Revert Nav hold changes by @breadoven in #9999
- WP mode altitude enforce hold fix by @breadoven in #10002
Full Changelog: 7.1.0...7.1.1
Contributors
Assets 178
- 1.52 MB
2024-05-06T11:16:29Z - 1.55 MB
2024-05-06T11:16:30Z - 1.56 MB
2024-05-06T11:16:31Z - 1.53 MB
2024-05-06T11:16:39Z - 1.52 MB
2024-05-06T11:16:32Z - 1.53 MB
2024-05-06T11:16:33Z - 1.55 MB
2024-05-06T11:16:35Z - 1.22 MB
2024-05-06T11:16:40Z - 1.22 MB
2024-05-06T11:16:36Z - 1.21 MB
2024-05-06T11:16:37Z -
2024-05-06T08:49:05Z -
2024-05-06T08:49:05Z -
INAV 7.1.0
Hello and welcome to INAV 7.1 "Ferocious Falcon"
Please carefully read all of this document for the best possible experience and safety.
Contact other pilots, share experiences, suggestions and ask for help on:
| INAV Discord Server | |
| INAV Official on Facebook |
Important Notes
INAV 7 is the last INAV official release available for F411 based flight controllers. The next milestone, INAV 8 will not be available for F411 boards.
The GPS NMEA protocol is no longer supported. All pilots are required to switch to UBLOX protocol. All modern GPS modules (even as old as from 2015 and earlier) support UBLOX protocol and there is not a single good reason to stick to NMEA nowadays
Make sure to remove props and check your motor and servo outputs before powering your upgraded flight controller with a battery for the first time. The changes to enable flexible motor and servo allocation may change what outputs your configuration uses by default.
PosHold, Navigation and RTH without compass PSA
Attention all drone pilots and enthusiasts,
Are you ready to take your flights to new heights with INAV 7.1? We've got some important information to share with you.
INAV 7.1 brings an exciting update to navigation capabilities. Now, you can soar through the skies, navigate waypoints, and even return to home without relying on a compass. Yes, you heard that right! But before you launch into the air, there's something crucial to consider.
While INAV 7.1 may not require a compass for basic navigation functions, we strongly advise you to install one for optimal flight performance. Here's why:
🛰️ Better Flight Precision: A compass provides essential data for accurate navigation, ensuring smoother and more precise flight paths.
🌐 Enhanced Reliability: With a compass onboard, your drone can maintain stability even in challenging environments, low speeds and strong wind.
🚀 Minimize Risks: Although INAV 7.1 can get you where you need to go without a compass, flying without one may result in a bumpier ride and increased risk of drift or inaccurate positioning.
Remember, safety and efficiency are paramount when operating drones. By installing a compass, you're not just enhancing your flight experience, but also prioritizing safety for yourself and those around you.
So, before you take off on your next adventure, make sure to equip your drone with a compass. It's the smart choice for smoother flights and better navigation.
Fly safe, fly smart with INAV 7.1 and a compass by your side!
Currently, if you wish to fly a multirotor without a compass. You will need to enable a compass (fake is ok) to change navigational modes in Configurator. You should disable the compass after making the changes. This has been fixed for a future release.
Note: You must remove the compass (including FAKE) to enable MR compass-free navigation flight. This will remove the visualisation of the modes from the 7.1.0 Configurator. However, as long as the modes were saved, they available in the flight controller and can be verified in the CLI aux section.
Upgrading from a previous release
Upgrading from INAV 7.0
- Backup configuration with CLI
diff allcommand - Download and install the new INAV Configurator 7.1
- Flash INAV 7.1 WITH Full Chip Erase option enabled
- Select Keep current settings from the defaults pop-up
- Go to CLI and restore your 7.0 diff
- Done
Upgrading from INAV 6 and 6.1
- Download and install the new INAV Configurator 7
- Save to a file the current diff all from the CLI.
- Upgrade to INAV 7 using the Full Erase option in the configurator.
- In case of Analog FPV, upload your OSD font of choice from the OSD tab.
- Go to the CLI again and paste the above-described contents from the file you previously created and write save , press ENTER.
- There are many new, changed, and removed settings. Check carefully that the settings are correct and fix any unrecognized or out-of-range items from the saved configuration.
- You should be ready, explore new 7.0 features, and enjoy!
Upgrading from older versions
Please follow the instructions on this page.
Major changes
Fixed wing Autoland with landing pattern
INAV supports advanced automatic landings for fixed wing aircraft from version 7.1. The procedure is based on landings for man-carrying aircraft, so that safe landings at a specific location are possible. Supported are landings at Safehome after "Return to Home" or at a defined LAND waypoint for missions.
See: Fixed Wing Landing.md
IMPORTANT: When updating from an older INAV version with a diff, please change the following settings before using Autoland for better performance.
Plane with no tail: set nav_wp_radius = 1000
Plane with tail: set nav_wp_radius = 800
Compass and Barometer changes
INAV now relies more heavily on GNSS data for navigation than before. This can provide more security if the Barometer fails, or if the multirotor is suffering from Compass interference. By still allowing it to navigate back to home.
From the release of INAV 7.1. The use of a compass is no longer mandatory for multirotor navigation as it once was. BUT it is still recommended for the best navigation performance, when it comes to maintaining a fixed position for an extended period of time, without heading drift. e.g. in Poshold. Or taking off and immediately starting a Waypoint mission.
If a user does decide to omit the use of a compass for a multirotor, be mindful that any navigation mode (RTH, Failsafe, Poshold, Cruise or a Waypoint mission) will not be operational UNTIL a GPS heading is first obtained, by flying in a straight line until both -
- The OSD Heading and Course over Ground indicators display a valid heading. Then keeping both headings closely aligned for a time.
- And the OSD Home arrow appears, showing a valid home direction.
Example Video
For more details see here
Tailsitter Support for VTOL
Tailsitter builds are now natively supported to allow proper Board Orientation switching during transition. Details
Other changes
Updated ICM426xx filtering
The filtering of the ICM426xx gyros has been updated based on changes made to both Ardupilot and BetaFlight and we expect better performance, when comparing to previous INAV versions.
OSD Changes
Users can now customize their own OSD messages, by way of the Programming Framework. Details
The Artificial Horizon will not properly track the real horizon in the correct way, when the craft is inverted. Details
New Fixedwing flight mode
The mode is called Angle Hold. For more details see here
New targets
- FLYCOLORF7V2
CLI
Changed settings
| Name | Description |
|---|---|
gps_dyn_model |
Default: AIR_2G GPS navigation model: Pedestrian, Automotive, Air<1g, Air<2g, Air<4g. Default is AIR_2G. Use pedestrian/Automotive with caution, can cause flyaways with fast flying. |
New Items
| Name | Description |
|---|---|
ahrs_gps_yaw_weight |
Arhs gps yaw weight when mag is avaliable, 0 means no gps yaw, 100 means equal weight as compass Values: 0 - 500 Default: 100 |
nav_fw_land_approach_length |
Length of the final approach Values: 100 - 100000 Default: 35000 |
nav_fw_land_final_approach_pitch2throttle_mod |
Modifier for pitch to throttle ratio at final approach. In Percent. Values: 100 - 400 Default: 100 |
nav_fw_land_flare_alt |
Initial altitude of the flare phase Values: 0 - 10000 Default: 150 |
nav_fw_land_flare_pitch |
Pitch value for flare phase. In degrees Values: -15 - 45 Default: 8 |
nav_fw_land_glide_alt |
Initial altitude of the glide phase Values: 100 - 5000 Default: 200 |
nav_fw_land_glide_pitch |
Pitch value for glide phase. In degrees. Values: -15 - 45 Default: 0 |
nav_fw_land_max_tailwind |
Max. tailwind (in cm/s) if no landing direction with downwind is available Values: 0 - 3000 Default: 140 |
nav_fw_launch_land_abort_deadband |
Launch and landing abort stick deadband in [r/c points], applied after r/c deadband and expo. The Roll/Pitch stick needs to be deflected beyond this deadband to abort the launch or landing. Values: 2 - 250 Default: 100. Replaces nav_fw_launch_abort_deadband |
nav_min_ground_speed |
Minimum ground speed for navigation flight modes [m/s]. Default 7 m/s. Values: 6 - 50 Default: 7 |
nav_rth_fs_landing_delay |
If landing is active on Failsafe and this is above 0. The aircraft will hover or loiter for X seconds before performing the landing. If the battery enters the warning or critical levels, the land will proceed. Default = 0 [seconds] Values: 0 - 1800... |
Contributors
Assets 173
INAV 7.1 RC1
Hello and welcome to INAV 7.1 "Ferocious Falcon"
Please carefully read all of this document for the best possible experience and safety.
Contact other pilots, share experiences, suggestions and ask for help on:
| INAV Discord Server | |
| INAV Official on Facebook |
Important Notes
INAV 7 is the last INAV official release available for F411 based flight controllers. The next milestone, INAV 8 will not be available for F411 boards.
The GPS NMEA protocol is no longer supported. All pilots are required to switch to UBLOX protocol. All modern GPS modules (even as old as from 2015 and earlier) support UBLOX protocol and there is not a single good reason to stick to NMEA nowadays
Make sure to remove props and check your motor and servo outputs before powering your upgraded flight controller with a battery for the first time. The changes to enable flexible motor and servo allocation may change what outputs your configuration uses by default.
Upgrading from a previous release
Upgrading from INAV 7.0
- Backup configuration with CLI
diff allcommand - Download and install the new INAV Configurator 7.1
- Flash INAV 7.1 WITH Full Chip Erase option enabled
- Select Keep current settings from the defaults pop-up
- Go to CLI and restore your 7.0 diff
- Done
Upgrading from INAV 6 and 6.1
- Download and install the new INAV Configurator 7
- Save to a file the current diff all from the CLI.
- Upgrade to INAV 7 using the Full Erase option in the configurator.
- In case of Analog FPV, upload your OSD font of choice from the OSD tab.
- Go to the CLI again and paste the above-described contents from the file you previously created and write save , press ENTER.
- There are many new, changed, and removed settings. Check carefully that the settings are correct and fix any unrecognized or out-of-range items from the saved configuration.
- You should be ready, explore new 7.0 features, and enjoy!
Upgrading from older versions
Please follow the instructions on this page.
Major changes
Fixed wing Autoland with landing pattern
INAV supports advanced automatic landings for fixed wing aircraft from version 7.1. The procedure is based on landings for man-carrying aircraft, so that safe landings at a specific location are possible. Supported are landings at Safehome after "Return to Home" or at a defined LAND waypoint for missions.
See: Fixed Wing Landing.md
Altitude and Heading estimation changes
INAV now relies more heavily on GNSS data for navigation than before. This can provide more security if the Barometer fails, or if the multirotor is suffering from Compass interference. By still allowing it to navigate back to home.
For more details see here
Other changes
Updated ICM426xx filtering
The filtering of the ICM426xx gyros has been updated based on changes made to both Ardupilot and BetaFlight and we expect better performance, when comparing to previous INAV versions.
Custom OSD
Users can now customize their own OSD messages, by way of the Programming Framework. Details
New Fixedwing flight mode
The mode is called Angle Hold. For more details see here
New targets
- FLYCOLORF7V2
CLI
Changed settings
| Name | Description |
|---|---|
gps_dyn_model |
Default: AIR_2G GPS navigation model: Pedestrian, Automotive, Air<1g, Air<2g, Air<4g. Default is AIR_2G. Use pedestrian/Automotive with caution, can cause flyaways with fast flying. |
New Items
| Name | Description |
|---|---|
ahrs_gps_yaw_weight |
Arhs gps yaw weight when mag is avaliable, 0 means no gps yaw, 100 means equal weight as compass Values: 0 - 500 Default: 100 |
nav_fw_land_approach_length |
Length of the final approach Values: 100 - 100000 Default: 35000 |
nav_fw_land_final_approach_pitch2throttle_mod |
Modifier for pitch to throttle ratio at final approach. In Percent. Values: 100 - 400 Default: 100 |
nav_fw_land_flare_alt |
Initial altitude of the flare phase Values: 0 - 10000 Default: 150 |
nav_fw_land_flare_pitch |
Pitch value for flare phase. In degrees Values: -15 - 45 Default: 8 |
nav_fw_land_glide_alt |
Initial altitude of the glide phase Values: 100 - 5000 Default: 200 |
nav_fw_land_glide_pitch |
Pitch value for glide phase. In degrees. Values: -15 - 45 Default: 0 |
nav_fw_land_max_tailwind |
Max. tailwind (in cm/s) if no landing direction with downwind is available Values: 0 - 3000 Default: 140 |
nav_fw_launch_land_abort_deadband |
Launch and landing abort stick deadband in [r/c points], applied after r/c deadband and expo. The Roll/Pitch stick needs to be deflected beyond this deadband to abort the launch or landing. Values: 2 - 250 Default: 100 |
nav_min_ground_speed |
Minimum ground speed for navigation flight modes [m/s]. Default 7 m/s. Values: 6 - 50 Default: 7 |
nav_rth_fs_landing_delay |
If landing is active on Failsafe and this is above 0. The aircraft will hover or loiter for X seconds before performing the landing. If the battery enters the warning or critical levels, the land will proceed. Default = 0 [seconds] Values: 0 - 1800 Default: 0 |
tailsitter_orientation_offset |
Apply a 90 deg pitch offset in sensor aliment for tailsitter flying mode Default: FALSE |
Removed Items
| Name | Description |
|---|---|
inav_w_xyz_acc_p |
|
nav_fw_launch_abort_deadband |
TL;DR
The list of most important changes is also available in a video form: https://youtu.be/8Q8t_KwlSAQ
Changelist
The full list of changes is available here
The full list of INAV Configurator changes is available here
What's Changed from INAV 7.0
- Update from master by @MrD-RC in #9427
- Fixed wing attitude stabilisation mode by @breadoven in #9294
- F411 PSA by @DzikuVx in #9459
- updates docs, removed vtx_freq artefacts by @RomanLut in #9506
- GEPRCF405 add IIC2 and change the barometer to IIC2 by @YI-BOYANG in #9510
- Enable dshot for unofficial BETAFPVF435 by @mmosca in #9532
- Add VTX power info for MAMBAH743_2022B target by @mmosca in #9539
- Release 7.0.0 by @DzikuVx in #9432
- Additional Description for Control Derivative by @MrD-RC in #9521
- Make min ground speed setable a parameter by @MrD-RC in #9428
- update f4 vcp in line with BF by @stronnag in #9544
- Add a parameter to delay landing in the event of a Failsafe by @MrD-RC in #9502
- Add ICM42688P to KAKUTEH7 by @DzikuVx in #9546
- Yaw/Altitude estimation sensor fusion by @shota3527 in #9387
- Navpid back calculation anti-windup can only shrink integrator by @shota3527 in #9224
- Add active waypoint number to blackbox by @breadoven in #9507
- SITL: OSD CMS menu does not work by @RomanLut in #9344
- add some icons for O3 with integra for ESP32 Radar instead of ? by @druckgott in #9499
- WP mission mode RTH and Manual mode lockout improvements 7.1.0 by @breadoven in #9558
- tail sitter vtol support by @shota3527 in #9347
- USB MSC: Fix SCIS mode sense write protection bit by @mluessi in #9572
- [Multirotor] Fix Sqrt Controller Position Z limits by @JulioCesarMatias in #9575
- Fix #9562 bmi166 acc readout by @mmosca in #9563
- Add support crsf baro altitude combined vario sensor by @r1000ru in #9438
- rebase and re-pr Fix at32 targets by @shanggl in #9618
- Allow S9 on SpeedyBee F405 V3 by @DzikuVx in #9614
- Enable Camera Control modes for MSP DisplayPort by @mmosca in #9626
- Add option to use display_force_sw_blink in msp displayport by @mmosca in #9627
- Fix ahi pitch when inverted by @MrD-RC in https://git...
Contributors
Assets 164
INAV 7.0.0
Hello and welcome to INAV 7 "Ferocious Falcon"
Please carefully read all of this document for the best possible experience and safety.
Contact other pilots, share experiences, suggestions and ask for help on:
| INAV Discord Server | |
| INAV Official on Facebook |
Important Notes
INAV 7 is the last INAV official release available for F411 based flight controllers. The next milestone, INAV 8 will not be available for F411 boards.
The GPS NMEA protocol is no longer supported. All pilots are required to switch to UBLOX protocol. All modern GPS modules (even as old as from 2015 and earlier) support UBLOX protocol and there is not a single good reason to stick to NMEA nowadays
The FrSky D-series telemetry support has been removed. This applies to legacy D4R receivers and some 3rd party whoop boards
Make sure to remove props and check your motor and servo outputs before powering your upgraded flight controller with a battery for the first time. The changes to enable flexible motor and servo allocation may change what outputs your configuration uses by default.
Upgrading from a previous release
Upgrading from INAV 6 and 6.1
- Download and install the new INAV Configurator 7
- Save to a file the current diff all from the CLI.
- Upgrade to INAV 7 using the Full Erase option in the configurator.
- In case of Analog FPV, upload your OSD font of choice from the OSD tab.
- Go to the CLI again and paste the above-described contents from the file you previously created and write save , press ENTER.
- There are many new, changed, and removed settings. Check carefully that the settings are correct and fix any unrecognized or out-of-range items from the saved configuration.
- You should be ready, explore new 7.0 features, and enjoy!
Upgrading from older versions
Please follow the instructions on this page.
Major changes
Flexible motor and servo output allocation
INAV now was a function that allows to flexibly assign functions to PWM outputs directly from INAV Configurator.
Specific function AUTO, MOTORS or SERVOS can be assigned to each Timer Group. Then, all outputs from this group will perform this function.
Thanks to this, it's possible to use servos and motors in ways that previously required building a custom targets.
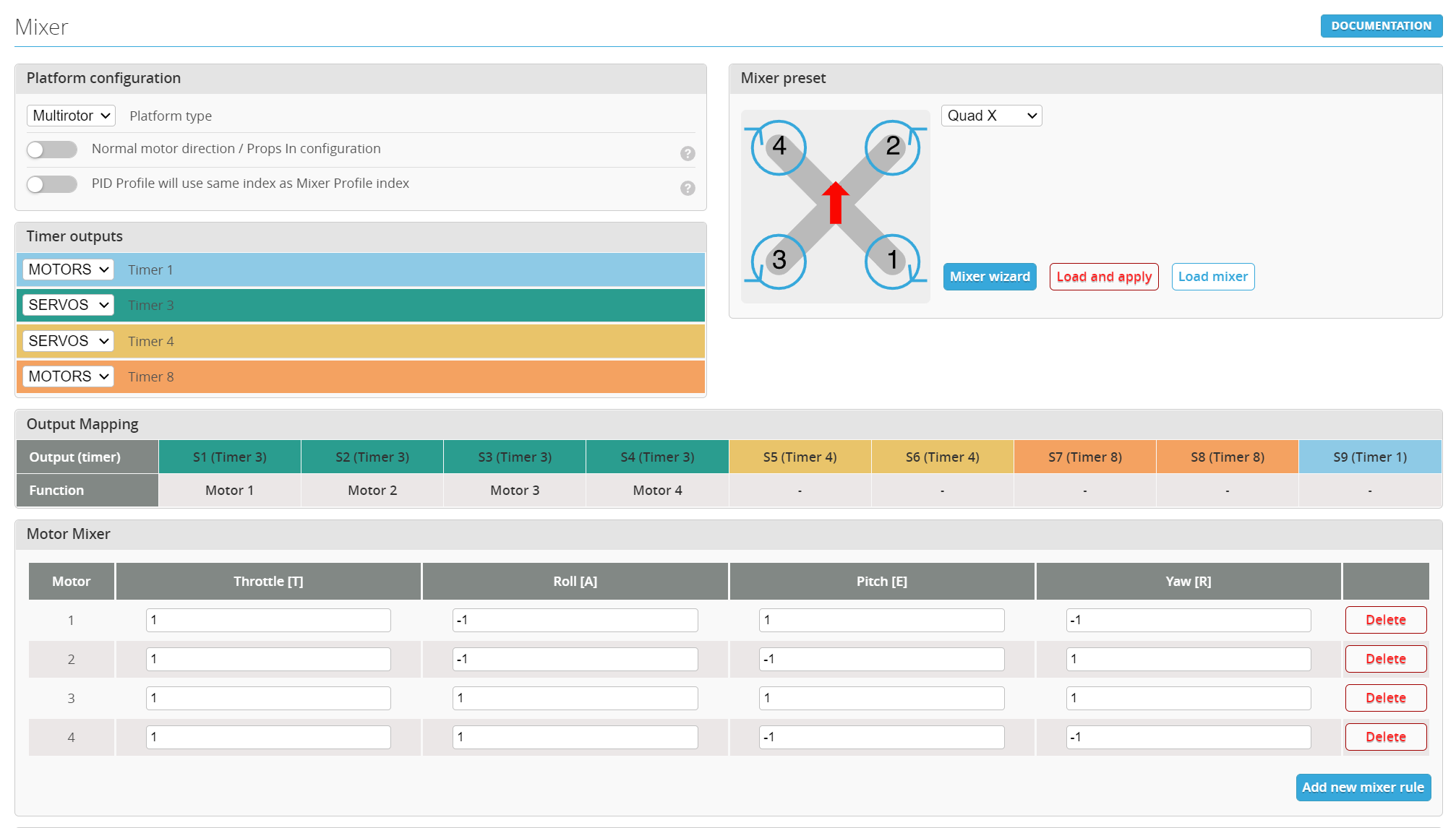
Bear in mind:
- In some rare cases, output assignment might be different than in INAV 6. This makes it even more important to remove your props and double check your outputs before you power your flight controller with batteries for the first time after applying your old settings or enabling outputs.
- It is not possible to assign function to individual outputs. It's a hardware, not software limitation.
Mixer profiles and VTOL support
This has been a frequent request since PNP VTOL models started becoming more common.
Read more in Mixer Profile INAV docs and VTOL INAV docs
Ez Tune
The Ez Tune is a simplified tuning framework similar to Betalight's Simplified Slider Tuning. Instead of setting each PID controller gain, rate, and filter setting separately, Pilot is presented with 8 sliders for:
- Axis ratio
- Main filter frequency
- Response
- Damping
- Stability
- Aggressiveness
- Rate
- Expo
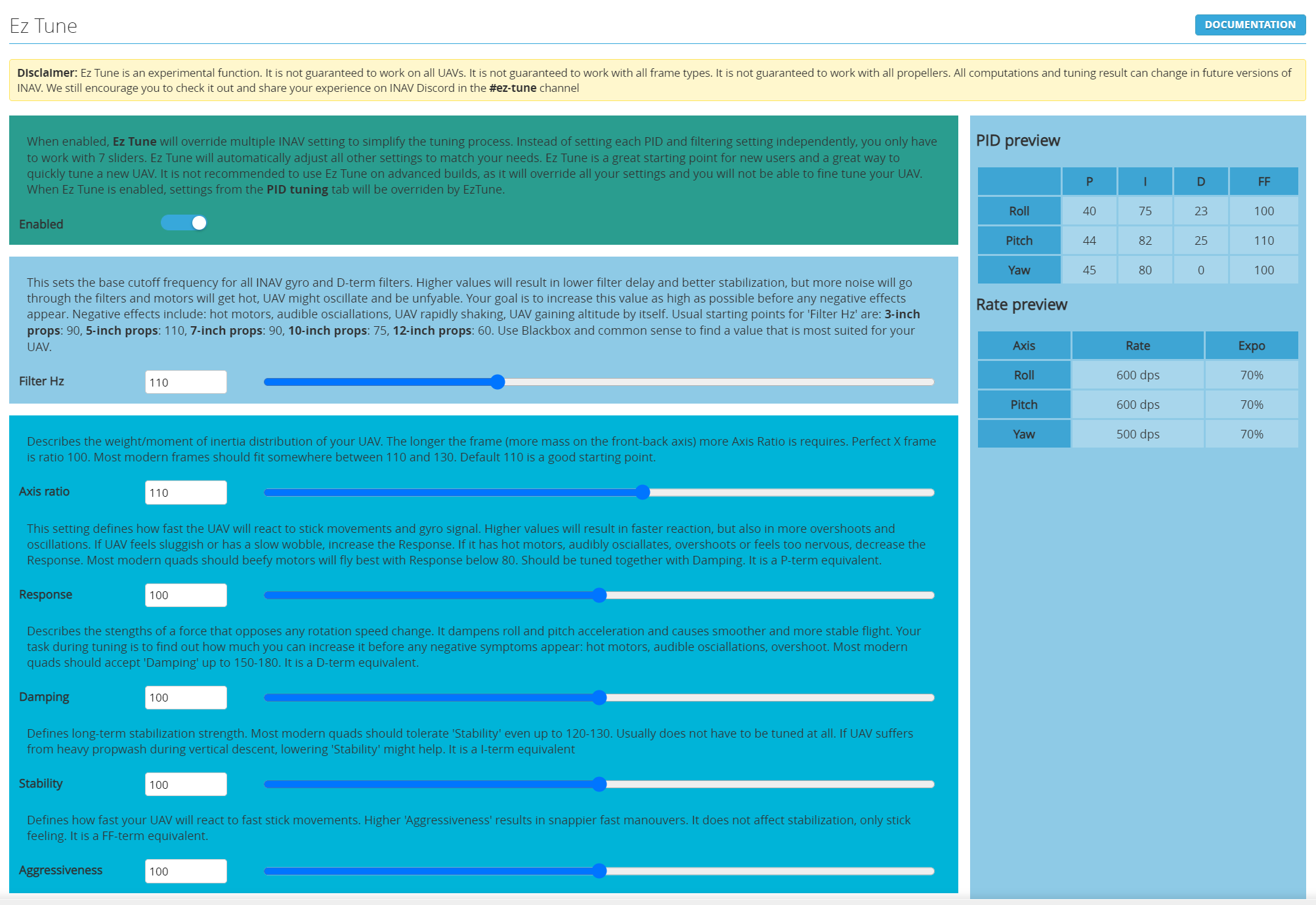
Ez Tune settings are not compatible with Betaflight Slider Tuning setting and cannot be migrated directly.
Read the description in Configurator's Ez Tune tab on what each setting does and how it should be used.
More on the topic of Ez Tune can be found here
In-flight Emergency Rearm
With INAV 7.0 came the ability to Emergency Rearm. This allows you to rearm in flight when you accidentally disarm. You need to do this within 5 seconds of disarming. Which sounds short, but is actually a pretty long time. Emergency Rearm can be used after a launch and while the aircraft still believes it's flying. It bypasses safety checks (including the throttle position) and doesn't trigger auto launch. Multirotors will also briefly switch to Angle to stabilise and level the flight. You can read all about it at https://github.com/iNavFlight/inav/pull/9254
Timer DMA Burst
INAV 7 adds the DMA Burst mode to selected target as ultimately fixes the problem of DSHOT protocol not working on some boards. Pilots do not have to take any actions, DSHOT is just available on previously affected flight controllers. This applies to:
- Matek F405 TE
- SpeedyBee F405 V3
JETI EXBUS fixed
The JETI EXBUS protocol should now not hang the flight controller during operation. The issue was originally fixed in betaflight/betaflight#13130 . Thank you @SteveCEvans and @klutvott123
Multirotor Cruise Mode
The Cruise Mode for Multirotors allows pilots to let go the radio sticks while UAV flies on a predefined course with predefined speed. Just like with regular PosHold, Throttle stick sets the altitude and course, while the pitch stick is used to set the horizontal speed. When released INAV will hold set speed, altitude, and course. More information available in here https://youtu.be/4pgDxexuSnU
NMEA Protocol no longer available
As mentioned in the Important Notes section, INAV 7 no longer supports the GPS NMEA protocol. All modern GPS module support one of the UBLOX protocols and as a result pilots must switch to either UBLOX or UBLOX7 protocol.
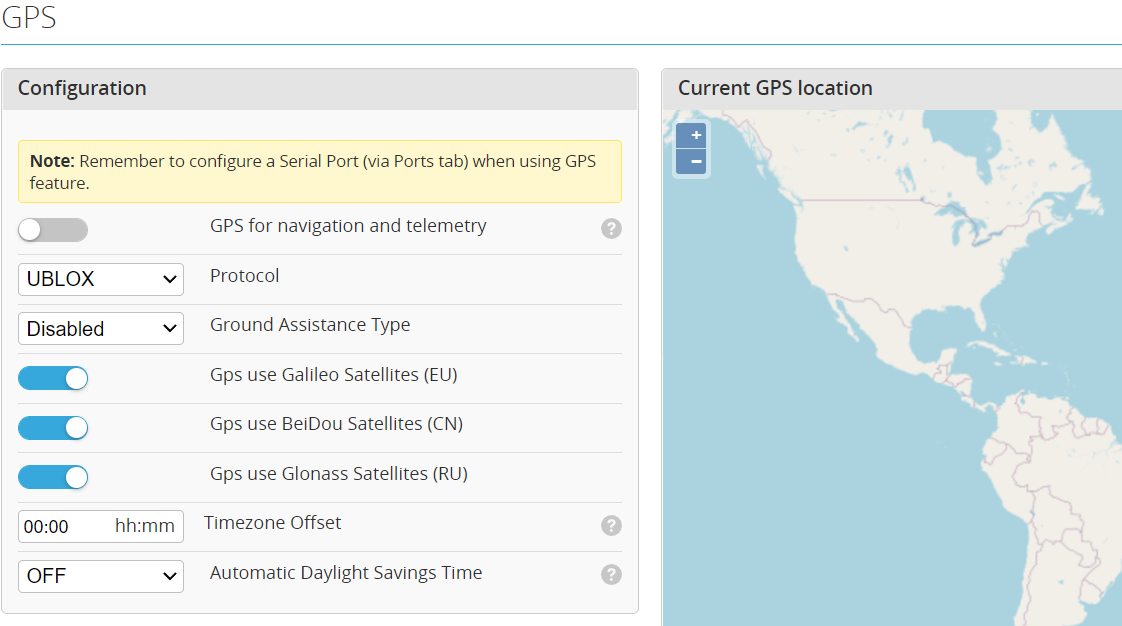
GPS Improvements
A number of improvements have been made to GPS support in INAV 7.
It is now possible to select multiple GPS constellations, and not only Galileo. If your GPS modules does not support a particular combination, it will fallback to no extra constellations.
M10 GPS units will now default to 10Hz, like M8 units and a new cli setting has been added to allow overriding the update rate of your UBLOX7 GPS (gps_ublox_nav_hz). This should allow you to fall back to 5Hz or bump it up to the limits of what is supported by your GPS module.
MSP VTX support
INAV now support MSP VTX when using MSP DisplayPort OSD.
Now it is possible to change VTX power levels and channels via INAV's OSD menu or ELRS backpack without connecting the SmartAudio wire on HD-Zero VTXs.
If you MSP DisplayPort OSD is working, no extra configuration is needed.
Linear Descent RTH mode changed
AT_LEAST_LINEAR_DESCENT is no longer a method for RTH. It has been replaced with a more flexible linear descent option that will work with any RTH method. If previously using AT_LEAST_LINEAR_DESCENT, you should now just use AT_LEAST as the RTH type. Linear Descent is now a separate option that can be used with any other RTH method. To make this possible, the target altitude of the descent is now the nav_rth_home_altitude. In some cases, if flying below the home position, this will work as a linear ascent.
You can also decide when the linear descent will start. Set the nav_rth_linear_descent_start_distance parameter to the distance (metres) from the home point, where you want to start descending. Set to 0, the default setting; the descent will start immediately, as with the pre-7.0 implementation.
These options are available in Configurator.
See the Navigation Mode: Return to Home wiki for more details.
Pilot Logos
You can now have custom pilot logos on your OSD and arming screen (HD Only). You will need to create a custom font with your logos to show them on screen. The OSD logo is a 3x1 character symbol. This can be used with both analogue and HD. The arming screen logo is a 10x4 character image, and only works with HD systems.
More details are available in the OSD Document.
Other changes
- The
AUTOLEVELmode is renamed toAUTO LEVEL TRIM. The functionality remains the same. - The
osd_mah_used_precisionparameter has been renamedosd_mah_precision. - 24 channels available for Jeti systems (not available with F411 or F722 flight controllers).
- Virtual pitot is enabled by default.
Other removed functions
- FrSky D-series telemetry
output_modesetting that allows to reassign all PWM outputs to either MOTORS or SERVOS
New targets
- SDmodel H7V1
- Matek H743HD
- SpeedyBee F405 V4
- SpeedeBee F405 Mini
- SpeedyBee F7 Mini V2
- GEPRCF405
- GEPRCF722
- NEUTRONRC F435 Mini AIO
- DAKEFPV F405
- DAKEFPV F722
- AtomRC F405 NAVI Delux
- JHEMCUF722
- JHEMCUF405
CLI
Changed settings
| Name | Description |
|---|---|
| gps_provider | Removed: NMEA |
| gps_sbas_mode | New: SPAN |
| nav_rth_alt_mode | Removed: AT_LEAST_LINEAR_DESCENT |
| pito... |
Contributors
Assets 161
INAV 7.0.0 RC3
Hello and welcome to INAV 7 "Ferocious Falcon"
Please carefully read all of this document for the best possible experience and safety.
Contact other pilots, share experiences, suggestions and ask for help on:
| INAV Discord Server | |
| INAV Official on Facebook |
Important Notes
INAV 7 is the last INAV official release available for F411 based flight controllers. The next milestone, INAV 8 will not be available for F411 boards.
The GPS NMEA protocol is no longer supported. All pilots are required to switch to UBLOX protocol. All modern GPS modules (even as old as from 2015 and earlier) support UBLOX protocol and there is not a single good reason to stick to NMEA nowadays
The FrSky D-series telemetry support has been removed. This applies to legacy D4R receivers and some 3rd party whoop boards
Make sure to remove props and check your motor and servo outputs before powering your upgraded flight controller with a battery for the first time. The changes to enable flexible motor and servo allocation may change what outputs your configuration uses by default.
Upgrading from a previous release
Upgrading from INAV 6 and 6.1
- Download and install the new INAV Configurator 7
- Save to a file the current diff all from the CLI.
- Upgrade to INAV 7 using the Full Erase option in the configurator.
- In case of Analog FPV, upload your OSD font of choice from the OSD tab.
- Go to the CLI again and paste the above-described contents from the file you previously created and write save , press ENTER.
- There are many new, changed, and removed settings. Check carefully that the settings are correct and fix any unrecognized or out-of-range items from the saved configuration.
- You should be ready, explore new 7.0 features, and enjoy!
Upgrading from older versions
Please follow the instructions on this page.
Major changes
Flexible motor and servo output allocation
INAV now was a function that allows to flexibly assign functions to PWM outputs directly from INAV Configurator.
Specific function AUTO, MOTORS or SERVOS can be assigned to each Timer Group. Then, all outputs from this group will perform this function.
Thanks to this, it's possible to use servos and motors in ways that previously required building a custom targets.
Bear in mind:
- In some rare cases, output assignment might be different than in INAV 6. This makes it even more important to remove your props and double check your outputs before you power your flight controller with batteries for the first time after applying your old settings or enabling outputs.
- It is not possible to assign function to individual outputs. It's a hardware, not software limitation.
Mixer profiles and VTOL support
This has been a frequent request since PNP VTOL models started becoming more common.
Read more in Mixer Profile INAV docs and VTOL INAV docs
Ez Tune
The Ez Tune is a simplified tuning framework similar to Betalight's Simplified Slider Tuning. Instead of setting each PID controller gain, rate, and filter setting separately, Pilot is presented with 8 sliders for:
- Axis ratio
- Main filter frequency
- Response
- Damping
- Stability
- Aggressiveness
- Rate
- Expo
Ez Tune settings are not compatible with Betaflight Slider Tuning setting and cannot be migrated directly.
Read the description in Configurator's Ez Tune tab on what each setting does and how it should be used.
More on the topic of Ez Tune can be found here
Timer DMA Burst
INAV 7 adds the DMA Burst mode to selected target as ultimately fixes the problem of DSHOT protocol not working on some boards. Pilots do not have to take any actions, DSHOT is just available on previously affected flight controllers. This applies to:
- Matek F405 TE
- SpeedyBee F405 V3
JETI EXBUS fixed
The JETI EXBUS protocol should now not hang the flight controller during operation. The issue was originally fixed in betaflight/betaflight#13130 . Thank you @SteveCEvans and @klutvott123
Multirotor Cruise Mode
The Cruise Mode for Multirotors allows pilots to let go the radio sticks while UAV flies on a predefined course with predefined speed. Just like with regular PosHold, Throttle stick sets the altitude and course, while the pitch stick is used to set the horizontal speed. When released INAV will hold set speed, altitude, and course. More information available in here https://youtu.be/4pgDxexuSnU
NMEA Protocol no longer available
As mentioned in the Important Notes section, INAV 7 no longer supports the GPS NMEA protocol. All modern GPS module support one of the UBLOX protocols and as a result pilots must switch to either UBLOX or UBLOX7 protocol.
GPS Improvements
A number of improvements have been made to GPS support in INAV 7.
It is now possible to select multiple GPS constellations, and not only Galileo. If your GPS modules does not support a particular combination, it will fallback to no extra constellations.
M10 GPS units will now default to 10Hz, like M8 units and a new cli setting has been added to allow overriding the update rate of your UBLOX7 GPS (gps_ublox_nav_hz). This should allow you to fall back to 5Hz or bump it up to the limits of what is supported by your GPS module.
MSP VTX support
INAV now support MSP VTX when using MSP DisplayPort OSD.
Now it is possible to change VTX power levels and channels via INAV's OSD menu or ELRS backpack without connecting the SmartAudio wire on HD-Zero VTXs.
If you MSP DisplayPort OSD is working, no extra configuration is needed.
Linear Descent RTH mode changed
AT_LEAST_LINEAR_DESCENT is no longer a method for RTH. It has been replaced with a more flexible linear descent option that will work with any RTH method. If previously using AT_LEAST_LINEAR_DESCENT, you should now just use AT_LEAST as the RTH type. Linear Descent is now a separate option that can be used with any other RTH method. To make this possible, the target altitude of the descent is now the nav_rth_home_altitude. In some cases, if flying below the home position, this will work as a linear ascent.
You can also decide when the linear descent will start. Set the nav_rth_linear_descent_start_distance parameter to the distance (metres) from the home point, where you want to start descending. Set to 0, the default setting; the descent will start immediately, as with the pre-7.0 implementation.
These options are available in Configurator.
See the Navigation Mode: Return to Home wiki for more details.
Pilot Logos
You can now have custom pilot logos on your OSD and arming screen (HD Only). You will need to create a custom font with your logos to show them on screen. The OSD logo is a 3x1 character symbol. This can be used with both analogue and HD. The arming screen logo is a 10x4 character image, and only works with HD systems.
More details are available in the OSD Document.
Other changes
- The
AUTOLEVELmode is renamed toAUTO LEVEL TRIM. The functionality remains the same. - The
osd_mah_used_precisionparameter has been renamedosd_mah_precision. - 24 channels available for Jeti systems (not available with F411 or F722 flight controllers).
- Virtual pitot is enabled by default.
Other removed functions
- FrSky D-series telemetry
output_modesetting that allows to reassign all PWM outputs to either MOTORS or SERVOS
New targets
- SDmodel H7V1
- Matek H743HD
- SpeedyBee F405 V4
- SpeedeBee F405 Mini
- SpeedyBee F7 Mini V2
- GEPRCF405
- GEPRCF722
- NEUTRONRC F435 Mini AIO
CLI
Changed settings
| Name | Description |
|---|---|
| gps_provider | Removed: NMEA |
| gps_sbas_mode | New: SPAN |
| nav_rth_alt_mode | Removed: AT_LEAST_LINEAR_DESCENT |
| pitot_hardware | New: DLVR-L10D |
New Items
| Name | Description |
|---|---|
| ez_aggressiveness | EzTune aggressiveness Values: 0 - 200 Default: 100 |
| ez_axis_ratio | EzTune axis ratio Values: 25 - 175 Default: 110 |
| ez_damping | EzTune damping Values: 0 - 200 Default: 100 |
| ez_enabled | Enables EzTune feature Default: FALSE |
| ez_expo | EzTune expo Values: 0 - 200 Default: 100 |
| ez_filter_hz | EzTune filter cutoff frequency Values: 10 - 300 Default: 110 |
| ez_rate | EzTune rate Values: 0 - 200 Default: 100 |
| ez_response | EzTune response Values: 0 - 200 Default: 100 |
| ez_stability | EzTune stability Values: 0 - 200 Default: 100 |
| gps_auto_baud_max_supported | Max baudrate supported by GPS unit. This is used during autobaud. M8 supports up to 460400, M10... |
Contributors
Assets 154
INAV 7.0.0 RC2
Hello and welcome to INAV 7 "Ferocious Falcon"
Please carefully read all of this document for the best possible experience and safety.
Contact other pilots, share experiences, suggestions and ask for help on:
| INAV Discord Server | |
| INAV Official on Facebook |
Important Notes
INAV 7 is the last INAV official release available for F411 based flight controllers. The next milestone, INAV 8 will not be available for F411 boards.
The GPS NMEA protocol is no longer supported. All pilots are required to switch to UBLOX protocol. All modern GPS modules (even as old as from 2015 and earlier) support UBLOX protocol and there is not a single good reason to stick to NMEA nowadays
The FrSky D-series telemetry support has been removed. This applies to legacy D4R receivers and some 3rd party whoop boards
Make sure to remove props and check your motor and servo outputs before powering your upgraded flight controller with a battery for the first time. The changes to enable flexible motor and servo allocation may change what outputs your configuration uses by default.
Upgrading from a previous release
Upgrading from INAV 6 and 6.1
- Download and install the new INAV Configurator 7
- Save to a file the current diff all from the CLI.
- Upgrade to INAV 7 using the Full Erase option in the configurator.
- In case of Analog FPV, upload your OSD font of choice from the OSD tab.
- Go to the CLI again and paste the above-described contents from the file you previously created and write save , press ENTER.
- There are many new, changed, and removed settings. Check carefully that the settings are correct and fix any unrecognized or out-of-range items from the saved configuration.
- You should be ready, explore new 7.0 features, and enjoy!
Upgrading from older versions
Please follow the instructions on this page.
Major changes
Flexible motor and servo output allocation
INAV now was a function that allows to flexibly assign functions to PWM outputs directly from INAV Configurator.
Specific function AUTO, MOTORS or SERVOS can be assigned to each Timer Group. Then, all outputs from this group will perform this function.
Thanks to this, it's possible to use servos and motors in ways that previously required building a custom targets.
Bear in mind:
- In some rare cases, output assignment might be different than in INAV 6. This makes it even more important to remove your props and double check your outputs before you power your flight controller with batteries for the first time after applying your old settings or enabling outputs.
- It is not possible to assign function to individual outputs. It's a hardware, not software limitation.
Mixer profiles and VTOL support
This has been a frequent request since PNP VTOL models started becoming more common.
Read more in Mixer Profile INAV docs and VTOL INAV docs
Ez Tune
The Ez Tune is a simplified tuning framework similar to Betalight's Simplified Slider Tuning. Instead of setting each PID controller gain, rate, and filter setting separately, Pilot is presented with 8 sliders for:
- Axis ratio
- Main filter frequency
- Response
- Damping
- Stability
- Aggressiveness
- Rate
- Expo
Ez Tune settings are not compatible with Betaflight Slider Tuning setting and cannot be migrated directly.
Read the description in Configurator's Ez Tune tab on what each setting does and how it should be used.
More on the topic of Ez Tune can be found here
Timer DMA Burst
INAV 7 adds the DMA Burst mode to selected target as ultimately fixes the problem of DSHOT protocol not working on some boards. Pilots do not have to take any actions, DSHOT is just available on previously affected flight controllers. This applies to:
- Matek F405 TE
- SpeedyBee F405 V3
JETI EXBUS fixed
The JETI EXBUS protocol should now not hang the flight controller during operation. The issue was originally fixed in betaflight/betaflight#13130 . Thank you @SteveCEvans and @klutvott123
Multirotor Cruise Mode
The Cruise Mode for Multirotors allows pilots to let go the radio sticks while UAV flies on a predefined course with predefined speed. Just like with regular PosHold, Throttle stick sets the altitude and course, while the pitch stick is used to set the horizontal speed. When released INAV will hold set speed, altitude, and course. More information available in here https://youtu.be/4pgDxexuSnU
NMEA Protocol no longer available
As mentioned in the Important Notes section, INAV 7 no longer supports the GPS NMEA protocol. All modern GPS module support one of the UBLOX protocols and as a result pilots must switch to either UBLOX or UBLOX7 protocol.
GPS Improvements
A number of improvements have been made to GPS support in INAV 7.
It is now possible to select multiple GPS constellations, and not only Galileo. If your GPS modules does not support a particular combination, it will fallback to no extra constellations.
M10 GPS units will now default to 10Hz, like M8 units and a new cli setting has been added to allow overriding the update rate of your UBLOX7 GPS (gps_ublox_nav_hz). This should allow you to fall back to 5Hz or bump it up to the limits of what is supported by your GPS module.
MSP VTX support
INAV now support MSP VTX when using MSP DisplayPort OSD.
Now it is possible to change VTX power levels and channels via INAV's OSD menu or ELRS backpack without connecting the SmartAudio wire on HD-Zero VTXs.
If you MSP DisplayPort OSD is working, no extra configuration is needed.
Linear Descent RTH mode changed
AT_LEAST_LINEAR_DESCENT is no longer a method for RTH. It has been replaced with a more flexible linear descent option that will work with any RTH method. If previously using AT_LEAST_LINEAR_DESCENT, you should now just use AT_LEAST as the RTH type. Linear Descent is now a separate option that can be used with any other RTH method. To make this possible, the target altitude of the descent is now the nav_rth_home_altitude. In some cases, if flying below the home position, this will work as a linear ascent.
You can also decide when the linear descent will start. Set the nav_rth_linear_descent_start_distance parameter to the distance (metres) from the home point, where you want to start descending. Set to 0, the default setting; the descent will start immediately, as with the pre-7.0 implementation.
These options are available in Configurator.
See the Navigation Mode: Return to Home wiki for more details.
Pilot Logos
You can now have custom pilot logos on your OSD and arming screen (HD Only). You will need to create a custom font with your logos to show them on screen. The OSD logo is a 3x1 character symbol. This can be used with both analogue and HD. The arming screen logo is a 10x4 character image, and only works with HD systems.
More details are available in the OSD Document.
Other changes
- The
AUTOLEVELmode is renamed toAUTO LEVEL TRIM. The functionality remains the same. - The
osd_mah_used_precisionparameter has been renamedosd_mah_precision. - 24 channels available for Jeti systems (not available with F411 or F722 flight controllers).
- Virtual pitot is enabled by default.
Other removed functions
- FrSky D-series telemetry
output_modesetting that allows to reassign all PWM outputs to either MOTORS or SERVOS
New targets
- SDmodel H7V1
- Matek H743HD
- SpeedyBee F405 V4
- SpeedeBee F405 Mini
- SpeedyBee F7 Mini V2
- GEPRCF405
- GEPRCF722
- NEUTRONRC F435 Mini AIO
CLI
Changed settings
| Name | Description |
|---|---|
| gps_provider | Removed: NMEA |
| gps_sbas_mode | New: SPAN |
| nav_rth_alt_mode | Removed: AT_LEAST_LINEAR_DESCENT |
| pitot_hardware | New: DLVR-L10D |
New Items
| Name | Description |
|---|---|
| ez_aggressiveness | EzTune aggressiveness Values: 0 - 200 Default: 100 |
| ez_axis_ratio | EzTune axis ratio Values: 25 - 175 Default: 110 |
| ez_damping | EzTune damping Values: 0 - 200 Default: 100 |
| ez_enabled | Enables EzTune feature Default: FALSE |
| ez_expo | EzTune expo Values: 0 - 200 Default: 100 |
| ez_filter_hz | EzTune filter cutoff frequency Values: 10 - 300 Default: 110 |
| ez_rate | EzTune rate Values: 0 - 200 Default: 100 |
| ez_response | EzTune response Values: 0 - 200 Default: 100 |
| ez_stability | EzTune stability Values: 0 - 200 Default: 100 |
| gps_auto_baud_max_supported | Max baudrate supported by GPS unit. This is used during autobaud. M8 supports up to 460400, M10... |
Contributors
Assets 153
INAV 7.0.0 RC1
Hello and welcome to INAV 7 "Ferocious Falcon"
Please carefully read all of this document for the best possible experience and safety.
Contact other pilots, share experiences, suggestions and ask for help on:
| INAV Discord Server | |
| INAV Official on Facebook |
Important Notes
The GPS NMEA protocol is no longer supported. All pilots are required to switch to UBLOX protocol. All modern GPS modules (even as old as from 2015 and earlier) support UBLOX protocol and there is not a single good reason to stick to NMEA nowadays
The FrSky D-series telemetry support has been removed. This applies to legacy D4R receivers and some 3rd party whoop boards
Make sure to remove props and check your motor and servo outputs before powering your upgraded flight controller with a battery for the first time. The changes to enable flexible motor and servo allocation may change what outputs your configuration uses by default.
Upgrading from a previous release
Upgrading from INAV 6 and 6.1
- Download and install the new INAV Configurator 7
- Save to a file the current diff all from the CLI.
- Upgrade to INAV 7 using the Full Erase option in the configurator.
- In case of Analog FPV, upload your OSD font of choice from the OSD tab.
- Go to the CLI again and paste the above-described contents from the file you previously created and write save , press ENTER.
- There are many new, changed, and removed settings. Check carefully that the settings are correct and fix any unrecognized or out-of-range items from the saved configuration.
- You should be ready, explore new 7.0 features, and enjoy!
Upgrading from older versions
Please follow the instructions on this page.
Major changes
Flexible motor and servo output allocation
INAV now was a function that allows to flexibly assign functions to PWM outputs directly from INAV Configurator.
Specific function AUTO, MOTORS or SERVOS can be assigned to each Timer Group. Then, all outputs from this group will perform this function.
Thanks to this, it's possible to use servos and motors in ways that previously required building a custom targets.
Bear in mind:
- In some rare cases, output assignment might be different than in INAV 6. This makes it even more important to remove your props and double check your outputs before you power your flight controller with batteries for the first time after applying your old settings or enabling outputs.
- It is not possible to assign function to individual outputs. It's a hardware, not software limitation.
Mixer profiles and VTOL support
This has been a frequent request since PNP VTOL models started becoming more common.
Read more in Mixer Profile INAV docs and VTOL INAV docs
Ez Tune
The Ez Tune is a simplified tuning framework similar to Betalight's Simplified Slider Tuning. Instead of setting each PID controller gain, rate, and filter setting separately, Pilot is presented with 8 sliders for:
- Axis ratio
- Main filter frequency
- Response
- Damping
- Stability
- Aggressiveness
- Rate
- Expo
Ez Tune settings are not compatible with Betaflight Slider Tuning setting and cannot be migrated directly.
Read the description in Configurator's Ez Tune tab on what each setting does and how it should be used.
More on the topic of Ez Tune can be found here
Timer DMA Burst
INAV 7 adds the DMA Burst mode to selected target as ultimately fixes the problem of DSHOT protocol not working on some boards. Pilots do not have to take any actions, DSHOT is just available on previously affected flight controllers. This applies to:
- Matek F405 TE
- SpeedyBee F405 V3
JETI EXBUS fixed
The JETI EXBUS protocol should now not hang the flight controller during operation. The issue was originally fixed in betaflight/betaflight#13130 . Thank you @SteveCEvans and @klutvott123
Multirotor Cruise Mode
The Cruise Mode for Multirotors allows pilots to let go the radio sticks while UAV flies on a predefined course with predefined speed. Just like with regular PosHold, Throttle stick sets the altitude and course, while the pitch stick is used to set the horizontal speed. When released INAV will hold set speed, altitude, and course. More information available in here https://youtu.be/4pgDxexuSnU
NMEA Protocol no longer available
As mentioned in the Important Notes section, INAV 7 no longer supports the GPS NMEA protocol. All modern GPS module support one of the UBLOX protocols and as a result pilots must switch to either UBLOX or UBLOX7 protocol.
GPS Improvements
A number of improvements have been made to GPS support in INAV 7.
It is now possible to select multiple GPS constellations, and not only Galileo. If your GPS modules does not support a particular combination, it will fallback to no extra constellations.
M10 GPS units will now default to 10Hz, like M8 units and a new cli setting has been added to allow overriding the update rate of your UBLOX7 GPS (gps_ublox_nav_hz). This should allow you to fall back to 5Hz or bump it up to the limits of what is supported by your GPS module.
MSP VTX support
INAV now support MSP VTX when using MSP DisplayPort OSD.
Now it is possible to change VTX power levels and channels via INAV's OSD menu or ELRS backpack without connecting the SmartAudio wire on HD-Zero VTXs.
If you MSP DisplayPort OSD is working, no extra configuration is needed.
Linear Descent RTH mode changed
AT_LEAST_LINEAR_DESCENT is no longer a method for RTH. It has been replaced with a more flexible linear descent option that will work with any RTH method. If previously using AT_LEAST_LINEAR_DESCENT, you should now just use AT_LEAST as the RTH type. Linear Descent is now a separate option that can be used with any other RTH method. To make this possible, the target altitude of the descent is now the nav_rth_home_altitude. In some cases, if flying below the home position, this will work as a linear ascent.
You can also decide when the linear descent will start. Set the nav_rth_linear_descent_start_distance parameter to the distance (metres) from the home point, where you want to start descending. Set to 0, the default setting; the descent will start immediately, as with the pre-7.0 implementation.
These options are available in Configurator.
See the Navigation Mode: Return to Home wiki for more details.
Pilot Logos
You can now have custom pilot logos on your OSD and arming screen (HD Only). You will need to create a custom font with your logos to show them on screen. The OSD logo is a 3x1 character symbol. This can be used with both analogue and HD. The arming screen logo is a 10x4 character image, and only works with HD systems.
More details are available in the OSD Document.
Other changes
- The
AUTOLEVELmode is renamed toAUTO LEVEL TRIM. The functionality remains the same. - The
osd_mah_used_precisionparameter has been renamedosd_mah_precision. - 24 channels available for Jeti systems (not available with F411 or F722 flight controllers).
- Virtual pitot is enabled by default.
Other removed functions
- FrSky D-series telemetry
output_modesetting that allows to reassign all PWM outputs to either MOTORS or SERVOS
New targets
- SDmodel H7V1
- Matek H743HD
- SpeedyBee F405 V4
- SpeedeBee F405 Mini
- SpeedyBee F7 Mini V2
- GEPRCF405
- GEPRCF722
- NEUTRONRC F435 Mini AIO
CLI
Changed settings
| Name | Description |
|---|---|
| gps_provider | Removed: NMEA |
| gps_sbas_mode | New: SPAN |
| nav_rth_alt_mode | Removed: AT_LEAST_LINEAR_DESCENT |
| pitot_hardware | New: DLVR-L10D |
New Items
| Name | Description |
|---|---|
| ez_aggressiveness | EzTune aggressiveness Values: 0 - 200 Default: 100 |
| ez_axis_ratio | EzTune axis ratio Values: 25 - 175 Default: 110 |
| ez_damping | EzTune damping Values: 0 - 200 Default: 100 |
| ez_enabled | Enables EzTune feature Default: FALSE |
| ez_expo | EzTune expo Values: 0 - 200 Default: 100 |
| ez_filter_hz | EzTune filter cutoff frequency Values: 10 - 300 Default: 110 |
| ez_rate | EzTune rate Values: 0 - 200 Default: 100 |
| ez_response | EzTune response Values: 0 - 200 Default: 100 |
| ez_stability | EzTune stability Values: 0 - 200 Default: 100 |
| gps_auto_baud_max_supported | Max baudrate supported by GPS unit. This is used during autobaud. M8 supports up to 460400, M10 supports up to 921600 and 230400 is the value used before INAV 7.0 Default: 230400 |
| gps_ublox_nav_hz | Navigation update rate for UBLOX7 receivers. Some... |
Contributors
Assets 150
INAV 6.1.1 "Horizon Hawk"
Hello and welcome to INAV 6.1.1 "Horizon Hawk"
Please carefully read all of this document for the best possible experience and safety.
Get in touch with other pilots, share experiences, suggestions and ask for help on:
| INAV Discord Server | |
| INAV Official on Facebook |
Tested and suggested hardware can be found here
Upgrading from a previous release
Upgrading from INAV 6
- Download and install the new configurator
- Save to a file the current diff all from the CLI.
- Upgrade to INAV 6 using the Full Erase option in the configurator.
- Restore the configuration from the diff file
Upgrading from INAV 5 and 5.1
- Download and install the new configurator
- Save to a file the current diff all from the CLI.
- Upgrade to INAV 6 using the Full Erase option in the configurator.
- Upload your OSD font of choice from the OSD tab.
- Run your INAV 5.x diff through this tool. It will update some of the changed CLI parameters (See these release notes). Please pay special attention to the
ahrs_inertia_comp_methodparameter, as this must be correct for your platform. See the release notes below. - Go to the CLI again and paste the above-described contents from the file you previously created and write save , press ENTER.
- There are a large number of new, changed, and removed settings. Check carefully that the settings are correct and fix any unrecognized or out-of-range items from the saved configuration.
- You should be ready, explore new 6.0 features, and enjoy!
Upgrading from older versions
Please follow the instructions on this page.
Important changes
"Dolphining" bug fix
This release fixes a "dolphining" bug that was affecting fixed wing airplanes in autonomous modes and causing airplanes not being able to precisely control altitude. INAV 6.1.1 addresses this issue and solved the problem.
New targets
- FLYWOOF405PRO
Changelist
What's Changed
- FLYWOOF405PRO target by @DzikuVx in #9115
- Proposed fix for "dolphining" bug in 6.1 by @M0j0Risin in #9111
Full Changelog: 6.1.0...6.1.1
Contributors
Assets 150
INAV 6.1 "Horizon Hawk"
Hello and welcome to INAV 6.1 "Horizon Hawk"
Please carefully read all of this document for the best possible experience and safety.
Get in touch with other pilots, share experiences, suggestions and ask for help on:
| INAV Discord Server | |
| INAV Official on Facebook |
Tested and suggested hardware can be found here
Important Notes
- The STM32 F3 code was removed from repository, it's no longer possible to compile F3 locally
Upgrading from a previous release
Upgrading from INAV 6
- Download and install the new configurator
- Save to a file the current diff all from the CLI.
- Upgrade to INAV 6 using the Full Erase option in the configurator.
- Restore the configuration from the diff file
Upgrading from INAV 5 and 5.1
- Download and install the new configurator
- Save to a file the current diff all from the CLI.
- Upgrade to INAV 6 using the Full Erase option in the configurator.
- Upload your OSD font of choice from the OSD tab.
- Run your INAV 5.x diff through this tool. It will update some of the changed CLI parameters (See these release notes). Please pay special attention to the
ahrs_inertia_comp_methodparameter, as this must be correct for your platform. See the release notes below. - Go to the CLI again and paste the above-described contents from the file you previously created and write save , press ENTER.
- There are a large number of new, changed, and removed settings. Check carefully that the settings are correct and fix any unrecognized or out-of-range items from the saved configuration.
- You should be ready, explore new 6.0 features, and enjoy!
Upgrading from older versions
Please follow the instructions on this page.
Important changes
H7 stability
INAV 6.1 fixes a bug that was causing the H7 MCU to stop receiving RX signal after EEPROM save operation was performed. This happened from CMS and from Configurator. INAV 6.1 fixes the issue and RX operation is no longer stopped after the save operation
Betaflight HD OSD compatibility mode
INAV 6.1 adds the BFHDCOMPAT OSD mode that is compatible with the Betaflight HD OSD layout.
New targets
- HAKRCF722V2
- HAKRCF405V2
- SKYSTARSF722MINIHD
- SkyStars AT32
- SkyStars H743
CLI
Changed Items
| Name | Item |
|---|---|
| acc_hardware | New: LSM6DXX |
| current_sensor | New: FAKE |
| gps_provider | New: FAKE |
| nav_extra_arming_safety | Default: ALLOW_BYPASS |
| osd_video_system | New: BFHDCOMPAT |
| rangefinder_hardware | New: FAKE |
| receiver_type | New: SIM (SITL) |
| serial_rx | New: FBUS |
| voltage_sensor | New: FAKE |
Changelist
What's Changed
- OSD battery status cleanup by @breadoven in #8780
- Use MC "slow down for turning" option for RTH trackback by @breadoven in #8867
- Fix compilation if OSD is disabled by @DzikuVx in #8860
- Pitot values should only be used if pitot sensor is healthy by @RomanLut in #8857
- show !X on OSD on pitot failure by @RomanLut in #8856
- Add ICM42688 and BMI270 to Betafpv F722 #8841 by @mmosca in #8842
- Enable Auto RC Smoothing by default by @DzikuVx in #8908
- Rangefinder OSD Element Bugfix by @Scavanger in #8853
- Update Windows 11 - VS Code - WSL2 - Hardware Debugging.md by @whsMCU in #8818
- Add support for AT32 chips by @DusKing1 in #8752
- Show loiter instead of poshold in OSD for fixed wing by @MrD-RC in #8892
- SITL (x86) Target by @Scavanger in #8731
- 6.1.0 sitl interop by @stronnag in #8913
- Pull all servos to min when disarmed if thr is mixed in by @DzikuVx in #8916
- Set ALLOW_BYPASS as default nav_extra_arming_safety by @DzikuVx in #8909
- BFCOMPAT mods to increase precision in value scalings by @rmaia3d in #8866
- [SITL] parameterise and reduce TASK_SERIAL rate by @stronnag in #8921
- Add Betaflight "HD" compatibility by @mmosca in #8707
- Improvements to BFCOMPAT character and icon mappings by @rmaia3d in #8926
- Revert "Improvements to BFCOMPAT character and icon mappings" by @mmosca in #8928
- [SITL] Enable telemetry: LTM and MAVLink by @stronnag in #8940
- Fix RX susped on EEPROM operations by @DzikuVx in #8907
- Navigation altitude and position controller reset improvements by @breadoven in #8896
- [SITL Doc] fix typo, clarifications by @stronnag in #8952
- Revert "Switch H7 to -Ofast optimizations" by @DzikuVx in #8948
- Set F7 GCC optimizations to -O2 for F745 and -Os for F277 Always by @DzikuVx in #8953
- Dzikuvx skystars h743 by @DzikuVx in #8954
- Remove custom compiler optimizations by @DzikuVx in #8958
- Fix LED Indicators mode for Fixed Wing and Rover by @MrD-RC in #8826
- OSD single page stats by @M0j0Risin in #8755
- Add HAKRCF722V2 target by @nmaggioni in #8970
- Add HAKRCF405V2 target by @nmaggioni in #8969
- [SITL] remove unused / unneeded variables by @stronnag in #8982
- Add target SKYSTARSF722MINIHD by @shellixyz in #8794
- Add support for FBUS by @MrD-RC in #8712
- Improvements to BARO_MSP by @ricardodeazambuja in #8534
- [SITL] sitl specific cmake cleanup (Windows only linker option) by @stronnag in #8995
- Update OSD throttle options by @MrD-RC in #8806
- [SITL] Fix disconnect issue under cygwin by @Scavanger in #9000
- Fix issue with DJI O3 showing miles instead of kFt by @MrD-RC in #9007
- Betaflight configuration AH_DECORATION improvements by @mmosca in #9010
- add dps310 driver for SAGEATF4 target by @shanggl in #9011
- Fix SITL compilation on macosx by @mmosca in #9012
- [SITL] 'fix off-by-one' test for max serial port by @stronnag in #9029
- Fix mspSerialTxBytesFree() in msp_serial.c by @Scavanger in #9022
- fix gpio mux to fix neutronrcf435mini fc blackbox missing bug. by @shanggl in #9014
- [SITL] fix race condition in serial_tcp.c by @stronnag in #9043
- Update HAKRCF405V2 DMA definitions by @nmaggioni in #9030
- Update HAKRCF722V2 DMA definitions by @nmaggioni in #9031
New Contributors
- @whsMCU made their first contribution in #8818
- @DusKing1 made their first contribution in #8752
- @rmaia3d made their first contribution in #8866
- @M0j0Risin made their first contribution in #8755
- @shanggl made their first contribution in #9011
Full Changelog: 6.0.0...6.1.0
Contributors
Assets 138
INAV 6.1 "Horizon Hawk" RC1
Hello and welcome to INAV 6.1 "Horizon Hawk"
Please carefully read all of this document for the best possible experience and safety.
Get in touch with other pilots, share experiences, suggestions and ask for help on:
| INAV Discord Server | |
| INAV Official on Facebook |
Tested and suggested hardware can be found here
Important Notes
- The STM32 F3 code was removed from repository, it's no longer possible to compile F3 locally
Upgrading from a previous release
Upgrading from INAV 6
- Download and install the new configurator
- Save to a file the current diff all from the CLI.
- Upgrade to INAV 6 using the Full Erase option in the configurator.
- Restore the configuration from the diff file
Upgrading from INAV 5 and 5.1
- Download and install the new configurator
- Save to a file the current diff all from the CLI.
- Upgrade to INAV 6 using the Full Erase option in the configurator.
- Upload your OSD font of choice from the OSD tab.
- Run your INAV 5.x diff through this tool. It will update some of the changed CLI parameters (See these release notes). Please pay special attention to the
ahrs_inertia_comp_methodparameter, as this must be correct for your platform. See the release notes below. - Go to the CLI again and paste the above-described contents from the file you previously created and write save , press ENTER.
- There are a large number of new, changed, and removed settings. Check carefully that the settings are correct and fix any unrecognized or out-of-range items from the saved configuration.
- You should be ready, explore new 6.0 features, and enjoy!
Upgrading from older versions
Please follow the instructions on this page.
Important changes
H7 stability
INAV 6.1 fixes a bug that was causing the H7 MCU to stop receiving RX signal after EEPROM save operation was performed. This happened from CMS and from Configurator. INAV 6.1 fixes the issue and RX operation is no longer stopped after the save operation
Betaflight HD OSD compatibility mode
INAV 6.1 adds the BFHDCOMPAT OSD mode that is compatible with the Betaflight HD OSD layout.
New targets
- HAKRCF722V2
- HAKRCF405V2
- SKYSTARSF722MINIHD
- SkyStars AT32
- SkyStars H743
CLI
Changed Items
| Name | Item |
|---|---|
| acc_hardware | New: LSM6DXX |
| current_sensor | New: FAKE |
| gps_provider | New: FAKE |
| nav_extra_arming_safety | Default: ALLOW_BYPASS |
| osd_video_system | New: BFHDCOMPAT |
| rangefinder_hardware | New: FAKE |
| receiver_type | New: SIM (SITL) |
| serial_rx | New: FBUS |
| voltage_sensor | New: FAKE |
Changelist
What's Changed
- OSD battery status cleanup by @breadoven in #8780
- Use MC "slow down for turning" option for RTH trackback by @breadoven in #8867
- Fix compilation if OSD is disabled by @DzikuVx in #8860
- Pitot values should only be used if pitot sensor is healthy by @RomanLut in #8857
- show !X on OSD on pitot failure by @RomanLut in #8856
- Add ICM42688 and BMI270 to Betafpv F722 #8841 by @mmosca in #8842
- Enable Auto RC Smoothing by default by @DzikuVx in #8908
- Rangefinder OSD Element Bugfix by @Scavanger in #8853
- Update Windows 11 - VS Code - WSL2 - Hardware Debugging.md by @whsMCU in #8818
- Add support for AT32 chips by @DusKing1 in #8752
- Show loiter instead of poshold in OSD for fixed wing by @MrD-RC in #8892
- SITL (x86) Target by @Scavanger in #8731
- 6.1.0 sitl interop by @stronnag in #8913
- Pull all servos to min when disarmed if thr is mixed in by @DzikuVx in #8916
- Set ALLOW_BYPASS as default nav_extra_arming_safety by @DzikuVx in #8909
- BFCOMPAT mods to increase precision in value scalings by @rmaia3d in #8866
- [SITL] parameterise and reduce TASK_SERIAL rate by @stronnag in #8921
- Add Betaflight "HD" compatibility by @mmosca in #8707
- Improvements to BFCOMPAT character and icon mappings by @rmaia3d in #8926
- Revert "Improvements to BFCOMPAT character and icon mappings" by @mmosca in #8928
- [SITL] Enable telemetry: LTM and MAVLink by @stronnag in #8940
- Fix RX susped on EEPROM operations by @DzikuVx in #8907
- Navigation altitude and position controller reset improvements by @breadoven in #8896
- [SITL Doc] fix typo, clarifications by @stronnag in #8952
- Revert "Switch H7 to -Ofast optimizations" by @DzikuVx in #8948
- Set F7 GCC optimizations to -O2 for F745 and -Os for F277 Always by @DzikuVx in #8953
- Dzikuvx skystars h743 by @DzikuVx in #8954
- Remove custom compiler optimizations by @DzikuVx in #8958
- Fix LED Indicators mode for Fixed Wing and Rover by @MrD-RC in #8826
- OSD single page stats by @M0j0Risin in #8755
- Add HAKRCF722V2 target by @nmaggioni in #8970
- Add HAKRCF405V2 target by @nmaggioni in #8969
- [SITL] remove unused / unneeded variables by @stronnag in #8982
- Add target SKYSTARSF722MINIHD by @shellixyz in #8794
- Add support for FBUS by @MrD-RC in #8712
- Improvements to BARO_MSP by @ricardodeazambuja in #8534
- [SITL] sitl specific cmake cleanup (Windows only linker option) by @stronnag in #8995
- Update OSD throttle options by @MrD-RC in #8806
New Contributors
- @whsMCU made their first contribution in #8818
- @DusKing1 made their first contribution in #8752
- @rmaia3d made their first contribution in #8866
- @M0j0Risin made their first contribution in #8755
Full Changelog: 6.0.0...6.1.0-RC1