How to use lvx file under ros
How to use lvx file in ros(在ROS驱动程序下使用lvx文件的方法)
lvx is a point cloud storage format customized by livox; if you want to use lvx file in ros, you need to convert it to rosbag file.
The operation steps are as follows :
- Open device manager;
- Connect device;
- Play point cloud;
- Record and save lvx data file;

git clone https://github.com/Livox-SDK/Livox-SDK.git
- Open the terminal window under this file path: ../Livox_SDK/build/sample/lidar_lvx_file
- Execute the follow command: ./lidar_lvx_sample
- Connect specify device: -c “Lidar SN”
- Set the duration of recorded point cloud data: -t 10 (10 second)



git clone https://github.com/Livox-SDK/livox_ros_driver.git ws_livox/src
If you need to convert rosbag data with the frequency to 10Hz, please set the ‘publish_freq’ parameter to 10.0 in "../ws_livox/src/livox_ros_driver/launch/lvx_to_rosbag.launch file". Similarly, you can set other frequencies.

../ws_livox
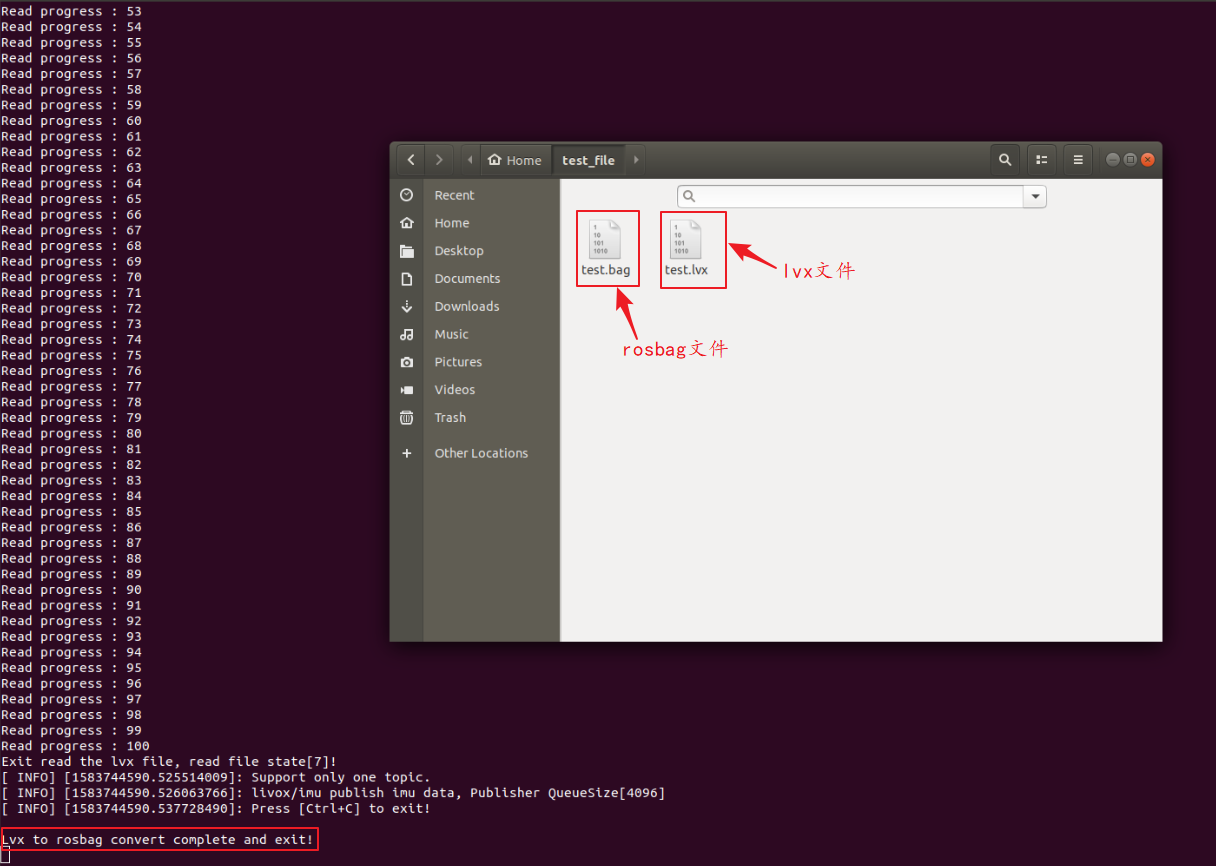
livox_ros_driver supports the conversion of lvx pointcloud data files to rosbag files. Use the command as follows :
roslaunch livox_ros_driver lvx_to_rosbag.launch lvx_file_path:="/home/livox/test.lvx"
After replacing "/home/livox/test.lvx" in the above command with the local lvx data file path, you can simply run it; if the conversion is successful, a rosbag format file with the same name will be generated under the above path.