Calibrate extrinsic and display under ros cn
览沃 ROS 驱动程序支持补偿 LiDAR 外参,在补偿外参之前必须标定好 LiDAR 外参。
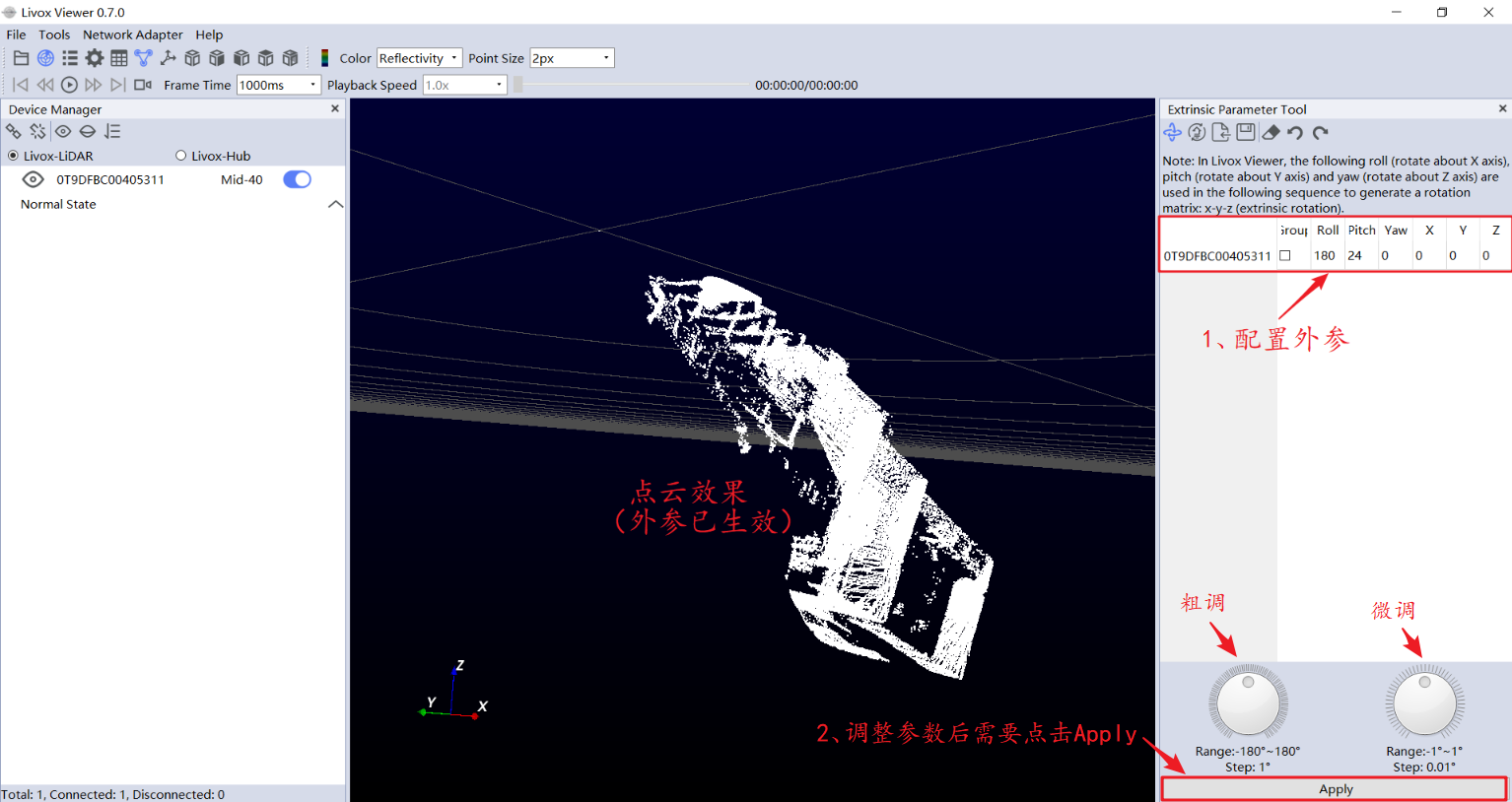
使用 Livox Viewer 标定外参的方法如下图 :

设置与写入雷达外参数值
注意事项 :
(1)在空旷环境下,准备标定物(标定板、标定支架……);
(2)寻找雷达之间的共同 FOV 方向的同一目标物;
(3)通过旋转一定角度,平移一定距离,使得目标物重叠;
(4)完成外参标定;
(5)如果没有共同 FOV ,则只能根据每个雷达之间的空间关系进行外参调整;
git clone https://github.com/Livox-SDK/livox_ros_driver.git ws_livox/src
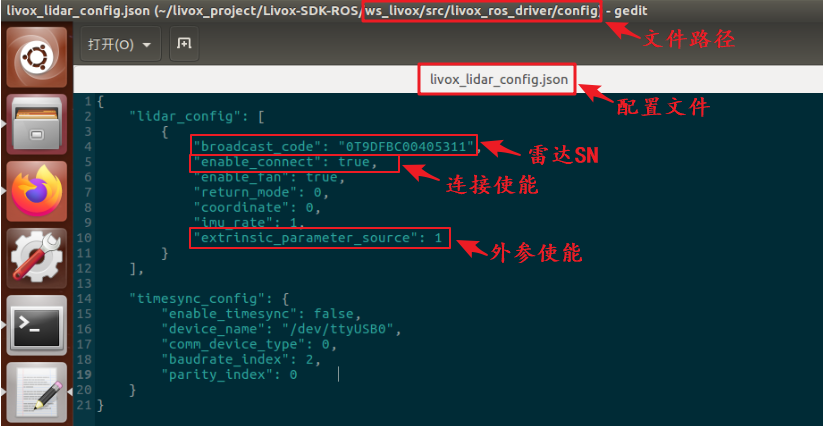
进入以下文件路径: "../ws_livox/src/livox_ros_driver/config",打开 livox_lidar_config.json 文件,如果只有一台设备,则只根据以下步骤修改对应的信息,如果有多台Livox雷达设备,则在 lidar_config 增加雷达的配置信息,再打开 Rviz 点云显示界面即可正常显示;
在 "../ws_livox" 文件路径下打开终端,执行以下语句连接当前局域网设备:
roslaunch livox_ros_driver livox_lidar_rviz.launch

