Set publish frequency
Set publish frequency(在ROS驱动程序中设置发布频率)
git clone https://github.com/Livox-SDK/livox_ros_driver.git ws_livox/src
Take the conversion of lvx files to rosbag files as an example :
If you need to convert rosbag data with the frequency to 10Hz, please set the ‘publish_freq’ parameter to 10.0 in "../ws_livox/src/livox_ros_driver/launch/lvx_to_rosbag.launch file". Similarly, you can set other frequencies.

../ws_livox
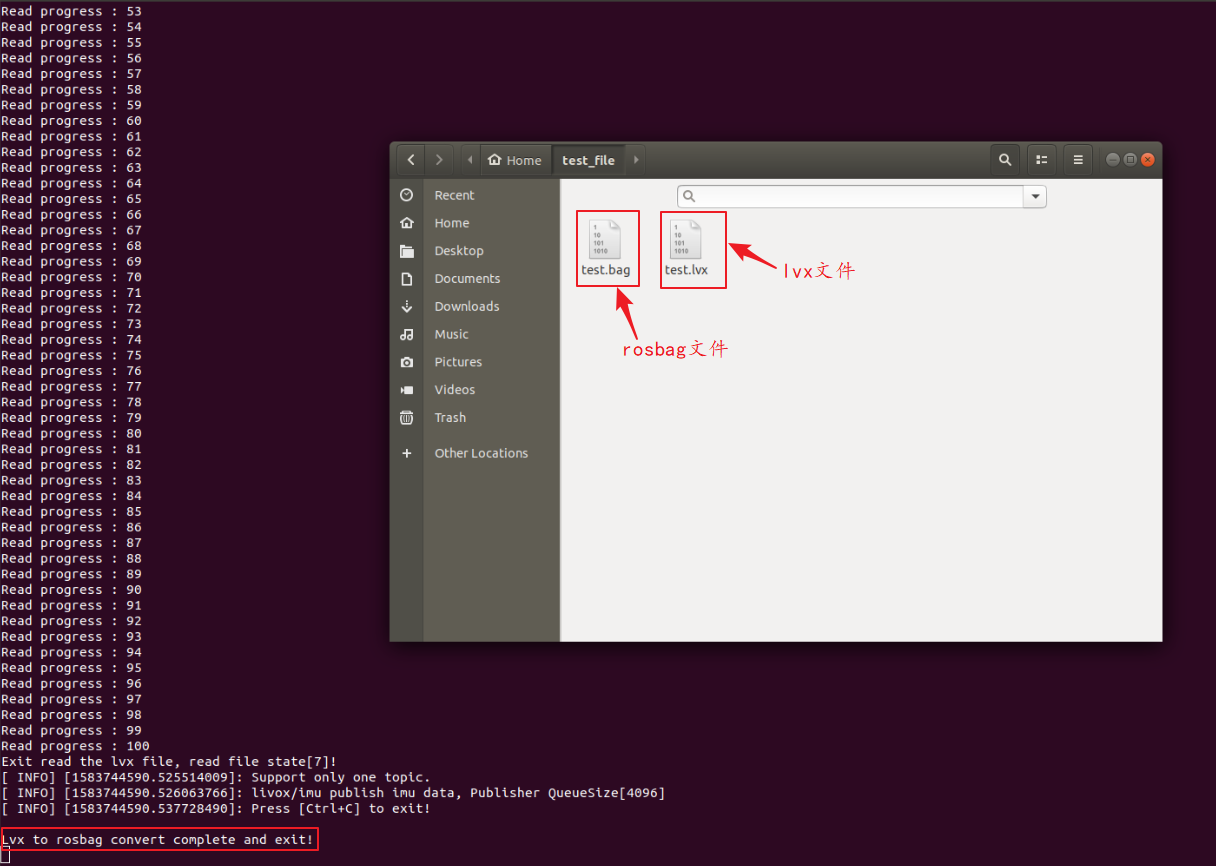
livox_ros_driver supports the conversion of lvx pointcloud data files to rosbag files. Use the command as follows :
roslaunch livox_ros_driver lvx_to_rosbag.launch lvx_file_path:="/home/livox/test.lvx"
After replacing "/home/livox/test.lvx" in the above command with the local lvx data file path, you can simply run it; if the conversion is successful, a rosbag format file with the same name will be generated under the above path.