Designed by Nikodem Bartnik.
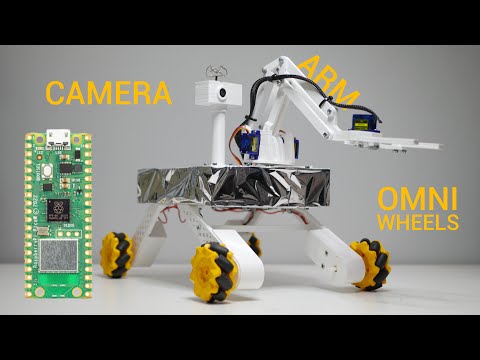
Pico Mars Rover was built as an educational platform to inspire and let kids (but not only) learn about programming, electronics, tehnology and space. Build around the new Raspberry Pi Pico W can be programmed in MicroPython and controlled through WiFi with a server app written in Python. Of course all the electronics can be replaced with for example Arduino. The chassis of the robot was built with Open Robotic Platform in mind so that it is easy to design holders, adapters and parts and reuse those you already have. I used cheap and popular DC motors together with omniwheels but feel free to experiment and replace the parts according to your needs.
Project is open source and all the files and the code are available above. I would be more than happy if you would like to use it to teach and inspire others for example at robotics classes in your school!
The parts used for this project:
If you buy the chassis like the one listed above you don't need to buy additional motors and wheels. All the parts are just examples. Use aht you have, what is more suitable for your project or what's currently cheaper.
Have you seen a mars rover without a robotic arm? Exactly, that's why I also designed one for this project. It's all 3D printed and uses cheap microservo motors. The arm is not perfect and after some experiments I had to make all the links shorter which reduced the range of the arm but the small motors are very limited. Redesigning the arm for standard servo motors might be a good idea but it might be hard to fit it on the robot.
For trasmitting the video live fromt he robot I used a small FPV camera and a screen. It was the easiest to use and quite inexpensive solution that let you expierience controlling the robot from a "control room" at a distance based only on the camera view, sensors and the arm.