Battery Status #4
Comments
|
In the software part it will be useful to encapsulate in RdRobotLib some function about robot status. Right know we are only planning to take information from the robot about battery status, but it should support in the future more robot information (gps position, gyroscope,etc). Im working on it right know |
|
I propose several states for the battery that are set using an integer.
|
|
I was actually going to propose implementing the YARP IBattery interface. Here's the raw of the file: |
|
Updated link in previous comment. |
|
+1 to the existing interface. IMHO, I think the focus should shift from the frontend side to the robot backend. It has no sense to implement the software support for battery status if we are not currently able to measure the battery status. |
|
+1 to the existing interface too @David-Estevez we already have a battery mesuared system. There is one in our closet This module is at the same a time a power regulator the will solve our two battery problem and it have also voltage and current mesuare. And the best thing, it only cost 5 $ |
😂😂😂 |
|
What I meant is that the most sensible approach, in my opinion, is a bottom-up approach: hardware -> firmware -> software , not the other way around. Nevertheless, feel free to add support for such a magnificent piece of Chinese engineering, it will definitely be useful to have such data. |
|
@rodriwp Could you please link to the current selected hardware? |
|
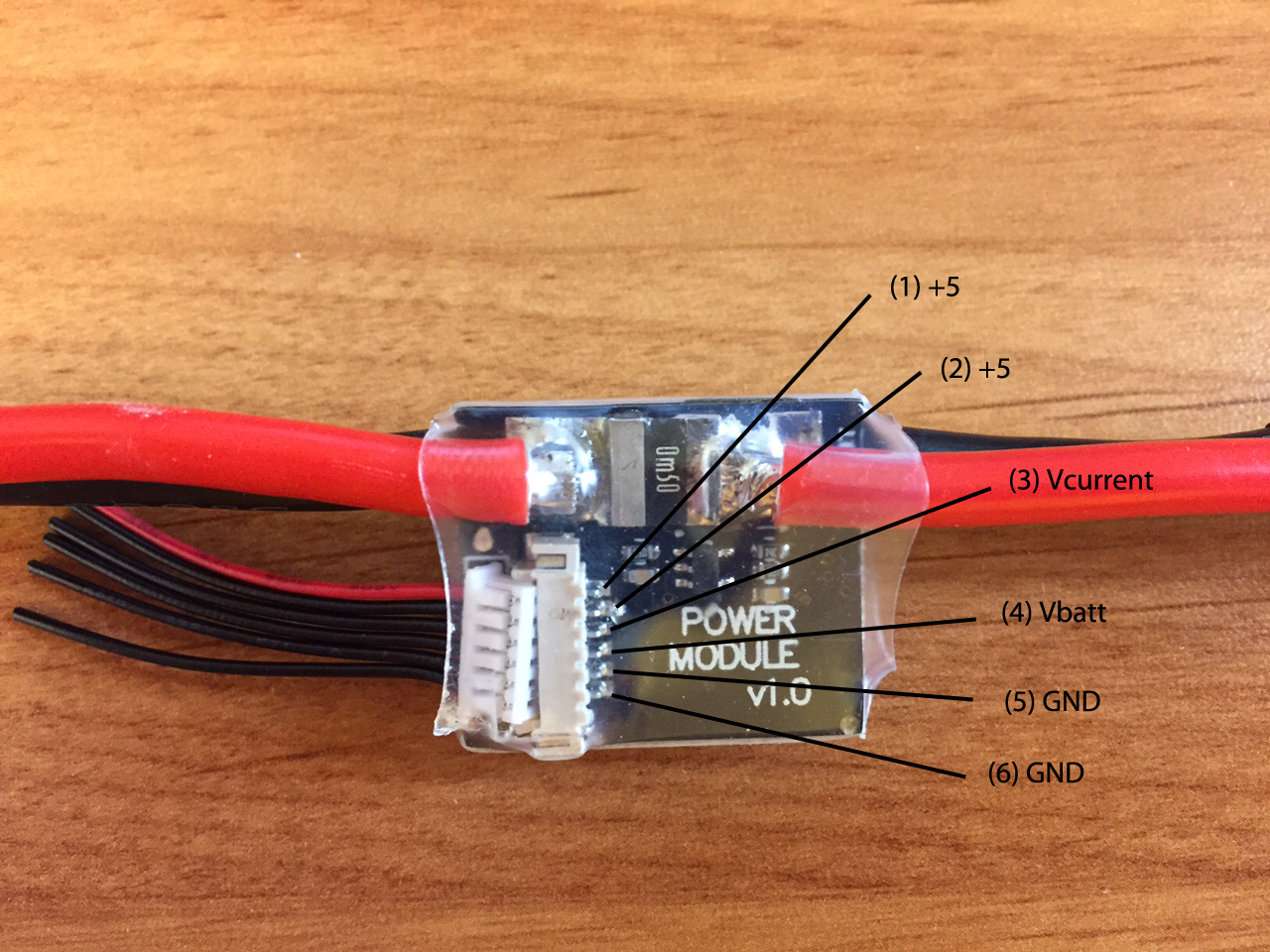
@jgvictores this is a link to the product POWER MODULE 1.0 |
|
@rodriwp Great, now could you link to a URL that describes the pinout? |
|
@jgvictores in a comment below you cand find the pinout. Here the link PinOut |
{kind=link}
|
Extra information about our device: |
|
@rodriwp As general questions related to the battery (NOT the power module):
|
|
|
Please focus on one specific model. Which one? |
|
We can focus on 2 cells 0.8 max A robots |
|
Please specify also the estimated current comsuption per device (e.g. SBC, motors (nominal and allowed peaks), camera, etc). |
|
The RD2 have the following parts:
Total: 1.8 A of current expected. |
|
What do you mean by checking? Which module do you mean? |
|
We should adjust the alarm values to the safety lipo operation range The circuit that is explain in http://controlrobotics.rodrigomompo.com/2013/10/tutorial-battery-charge-indicator.html, we have that circuit with us |
What do you mean by that?
Could you please provide a schematic that includes the components (a paper version like the previous would do)? |
|
I won't continue this idea as it lead to stalemate |
|
I guess it is the moment to really solve this. |
|
|
🍿 |
|
Ongoing PR: robotology/yarp#1583 |
For the rd2 version with ardubot will be nice to have feedback about the state of the batteries. This version use lipo bateries for the motors and is dangerous to discharge below a certain voltage(the value depends on the number of cells)
Smallest robots probably, will have an approximated voltage measure. For the biggest robots that use ardubot, there exists an voltage regulator,amperage measure and voltage measure that cost about 10 euros.
Here is a link http://www.dx.com/es/p/zndiy-bry-apm2-5-2-apm2-6-power-module-v1-0-output-w-bec-3a-xt60-plug-black-red-342902#.VNeeT_mG-Ck
http://copter.ardupilot.com/wiki/common-measuring-battery-voltage-and-current-consumption-with-apm/?lang=es
The text was updated successfully, but these errors were encountered: