Use Error-State KF algorithm to estimate attitude. The test data can be downloaded here.
对比我的代码与博主的代码对比
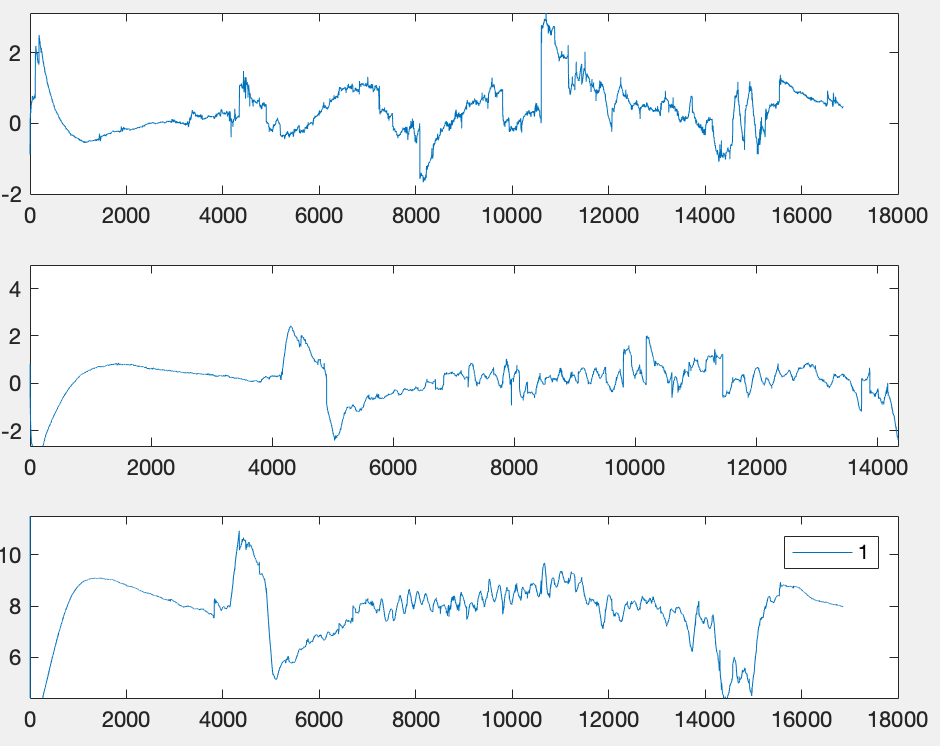
博主的实验,将误差直接除以2,不知为何
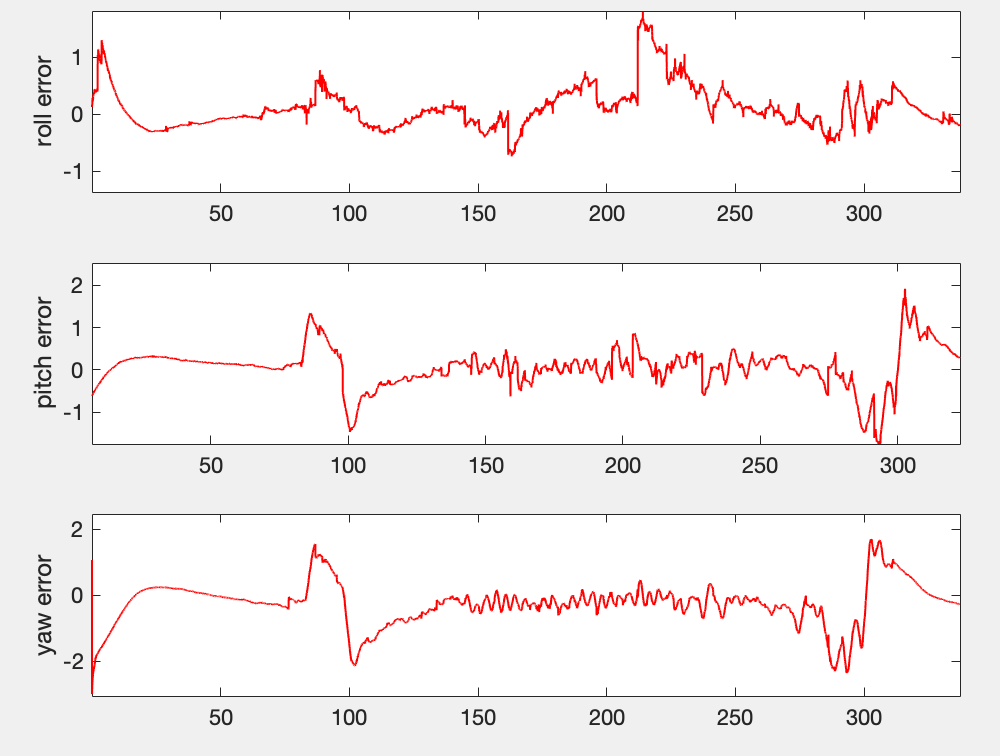
我做的ESKF
可见误差roll与pitch的误差大概是两倍左右。但是yaw的误差相比之下比较大,但是误差的变化趋势均比较一致。调整过q-->oula的函数之后,神奇的误差消失了,发现主要原因是角度固定偏差。
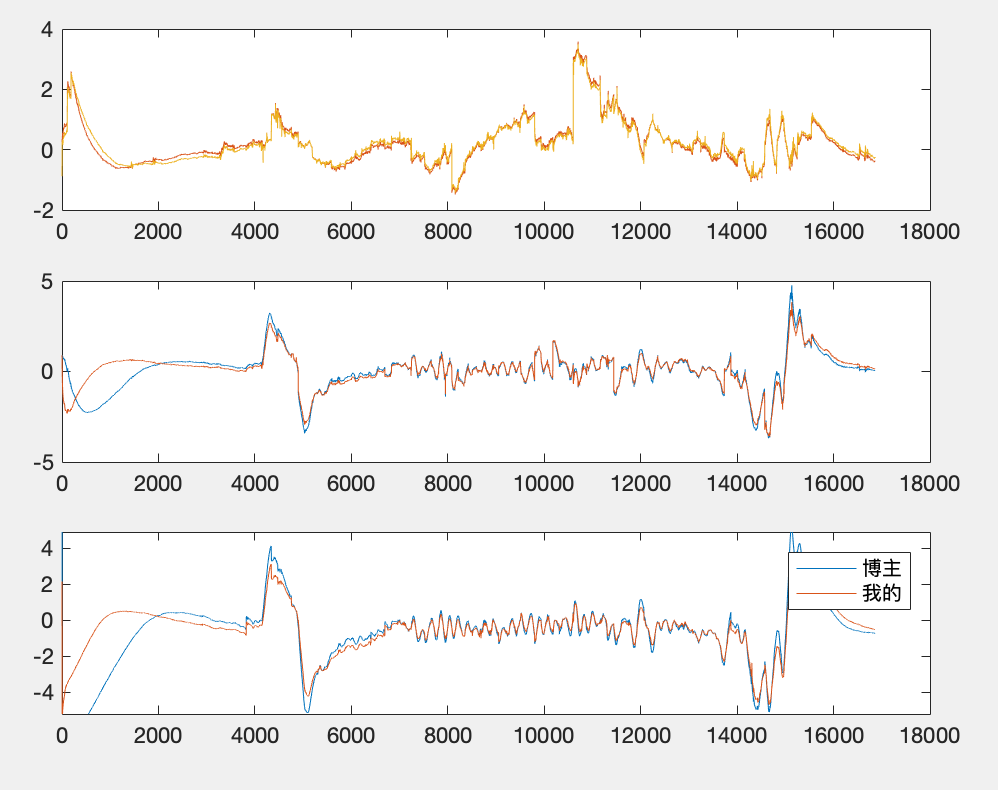
两个方法放在一起
EKF的结果要更差
对比EKF与ESKF的结果发现,ESKF暂时并没有表现出比EKF更好的效果。
实际上组合导航的角度误差并没有很大,组合导航的观测更加丰富,运动学方程中考虑的量也更多。
组合导航中角度的误差大小
首先利用AHRS方法进行预先处理
可见误差变得比较大。
比例积分的AHRS与ESKF之间的对比
yaw角度区别不大,其余两轴的区别比较明显。
存在几个问题:
- 没有对加速度计的信号进行低通滤波(todo),不知道有什么意义?对于数据的预处理
梯度下降的AHRS与ESKF之间的对比
相比之下,ESKF的姿态角度估计的优势也并不明显。
目前来看,error state的优势并不明显。
ESKF没有加上地磁计的测量量
可以发现,在没有地磁计的校准时,YAW角度的偏差比较大,bina
那么如果mahony互补滤波也缺乏地磁计的信号呢?
ESKF没有地磁,互补滤波没有地磁计
收到北航同学的博客启发,发现对于测量矩阵的雅可比矩阵有着更加简单的求导方法。
ESKF没有地磁计,并且换一种求H矩阵的方法
可以看到这样的误差相比上面是更大的。
Manhony也没有地磁计,并且计算测量雅可比矩阵时更换成R矩阵计算
可以见到互补滤波器的飘逸更加严重了。
这里的互补滤波器突然就飘到国外去了,可能是产生了奇异的问题。
四元数换成这种更新方式之后:
det_q = [1;0.5*SamplePeriod*Gyroscope'];
q = quatLeftComp(q)*det_q;
Quaternion = q / norm(q);
Rwb = q2R(quaternion_l);
Accelerometer = Accelerometer / norm(Accelerometer); % normalise magnitude
gra = [0;0;1];
v = -Rwb'*gra;
e = cross(Accelerometer, v);
eInt_n = eInt + e * SamplePeriod;
Gyroscope = Gyroscope + Kp * e + Ki * eInt_n;
dotR = Exp_lee(Gyroscope*SamplePeriod);
Rwb = Rwb*dotR;
q = zeros(1,4);
q = R2q(Rwb);
Quaternion = q / norm(q);
减去eskf估计出来的偏差之后,得到这样的结果。
结果虽然不是很好,但是与之前的相差不大。

为什么这里的旋转矩阵变成Rbw?与我之前的逻辑都不太一样。
- 四元数的多种更新方法
- 四元数的更新方法要比旋转矩阵更加精确,可能是因为四元数比较容易归一化。