Omnibus F4 Pro V3 with betaflight and raspberry pi MSP #53
Comments
|
Which betaflight version are you using? I can only test with betafligth 3.5 due to hardware limitations. Is everything working as expected on your PC with a USB connection? The error only appears on the Raspberry Pi with a serial connection? Can you specify what is working and what is not working on your PC and on the Raspberry Pi? The "box names" are unrelated to the MSP RX functionality. From your logs (please provide raw text instead of screenshots), I can only suggest that there is a transmission error. |
|
Thanks for reply. I'm using Version 4.1.1. client_read_test working as expected both on raspberry's UART connection and PC with USB connection. fcu_motors and fcu_test throwing the boxNames error. When running client_read_test on PC with USB the output:(./client_read_test /dev/ttyACM0) When I'm running fcu_motors on PC with USB the output:(./fcu_motors /dev/ttyACM0) FOR RASPBERRY: When I'm running fcu_motors on Raspberry Pi 4 via UART pins the output:(./fcu_motors /dev/ttyS0) Thanks again. |
|
If you check the message definitions at https://github.com/christianrauch/msp/blob/master/inc/msp/msp_msg.hpp, you can see that the IDs 112...116 are related to the "box" names and their values. Maybe these messages are just not supported anymore on newer firmware versions, or their definition changed. The reason why the "client" examples work and the "fcu" examples crash is that the FlightController class requires the boxes to check the flags, such as if the FCU is armed. If there is now another way to check the arm state of the FCU, I am happy to review A PR that replaces the boxes with this. |
|
Actually I don't know the structure very well but I tried to check IDs which are you said. What I did may be ridiculous but if you check I will be very thankful. First of all I clone the latest Betaflight from it's offical github. And with grep command in Linux terminal search for message definitions. Like this: And I did this for each message definition. IDs are same as you defined. That has a meaning ? If there is a estimated solution could you please say me what should I search? |
|
Hi I was looking for understand the code. Actually I'm not using C++ but I can understand the functions. I decided to understand error messages respectively. I started with; 79 76 59 83 84 73 67 75 32 67 79 77 77 65 78 68 83 32 68 73 83 65 66 76 69 59 Could that be the reason why we didn't get box names right? |
|
Problem is solved :) Thank you very much for your helps and source. Actually I'm not changed anything in your code. I guess I were loaded false firmware which I customized for try other solutions. I can arming the quad from pc on USB and from raspberry on UART two of them working. Thanks again. |
This looks like names for what used to be in the "boxes".
That is good to hear. I still don't know what caused the original problem, but if you could solve it on your side you can close this issue and reopen it in case the problem comes up again. |
Hi.Thanks for useful source.I have a problem with this. I can take sensor data from usb on computer. Also while I'm using UART6 on omnibus and serial rx/tx on raspberry pi I can take these datas as same.
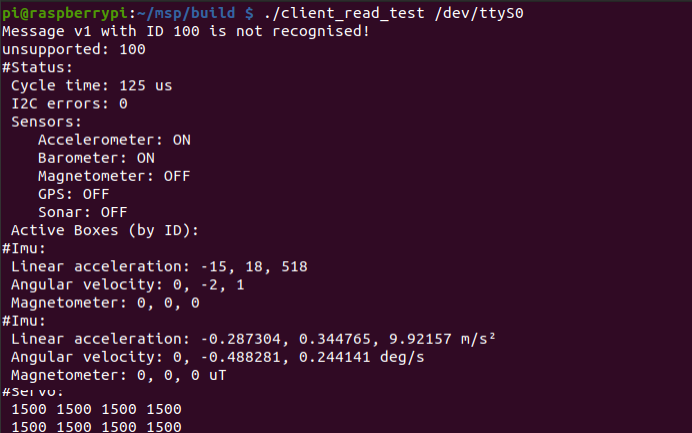
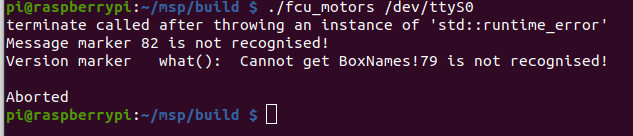
But when I try to run fcu_motors on computer I take this error:

Also when I run it on raspberry pi it throwing this:
I activated MSP on betaflight port tab also set MSP RX input at configuration tab.
What can I do about this?
Thanks.
The text was updated successfully, but these errors were encountered: