
This package is forked from the original motoman package kinetic devel, preserving only packages of interest. It contains a particular configuration for Lenny, Lenny's environment setup, as well it contains the package motoman variables created at CTAI to interact with the FS100 controller I/Os.
This metapackage contains packages developed by the ROS-I project.
- motoman Package
- motoman_driver Package
It is a modified version of the motoman_driver package. The modification allows the communication with FS100 controller's network variables. - motoman_msgs package
It is a modified version of themotoman_msgs package. Two new services were created the "ReadSingleIO.srv" and the "WriteSingleIO.srv". These services are used by the motoman_variables package. - motoman_sda_10f_moveit_config
This Package contains the main MoveIt! configuration for Lenny. - motoman_sda_10f_support
This Package contains the support elements required when using Lenny. - motoman_variables package. It was developed at CTAI. It facilitates the communication whit network variables using the "ReadSingleIO.srv" and the "WriteSingleIO.srv" services.
- Current research:
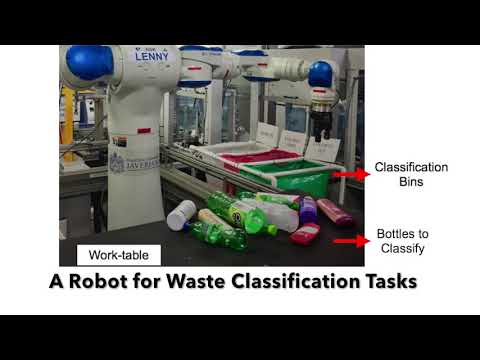
SDA10F robot used with MoveIt! framework for plastic bottle classification tasks.
{kind=link}
- Please follow the links for further information about each package.
Keep up with CTAI new developments! Watch our YouTube Channel.
Don't forget to subcribe!
Created by Nicolas Barrero May 2018
Modified by Nicolas Barrero Oct 2018
Modified by Nicolas Barrero Jan 2019
"Centro Tecnologico de Automatizacion Industrial" CTAI
Perception For Industrial Robots Project