{kind=link}
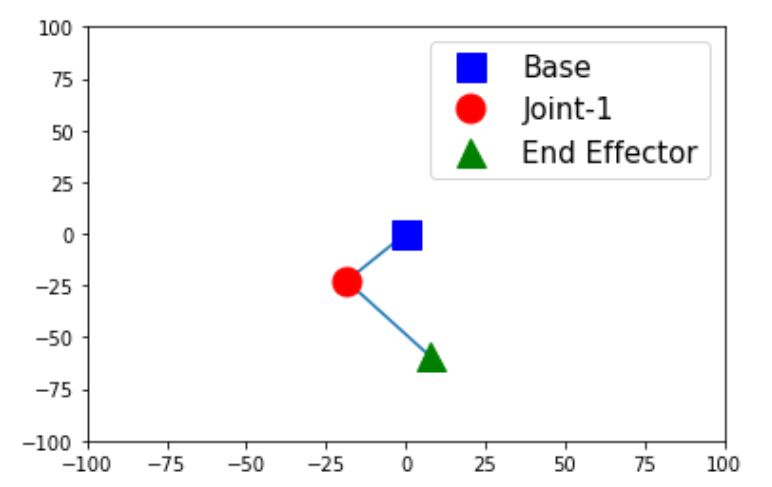
This code is for graphical representation of 2_DOF manipulator.
In this code random joints and link_length values are generated and applied to matplotlib to represent it as length of rigid links and joints values.
Generated Random Data
joint0_angle = 231.0 degrees
joint1_angle = 74.7 degrees
End Effector at x = 7.6 y = -59.1
Numpy
Matplotlib