- pwd: "Print Working Directory", imprime en la terminal el directorio en que estamos ubicados.
- ls: Muestra todos los subdirectorios y archivos que se encuentran en el directorio actual.
- cd: Permite movernos entre directorios, dependiendo de los argumentos entregados.
- touch: Crea un nuevo archivo segun la especificacion que le demos.
- rm: Borra un archivo especificado.
- mkdir: Crea un nuevo subdirectorio en el directorio actual.
- rmdir: Borra un directorio especificado; esto es porque los directorios no puden ser borrados con el comando "rm".
- mv: Usado para mover un archivo de un directorio a otro y tambien para cambiar los nombres de archivos. Puede ser usado para ambas cosas al tiempo.
- cp: Funciona de forma similar al comando "mv", pero creando una copia del archivo en vez de moviendo el original.
- man: Abre el manual de un comando especificado, permite ver que argumentos pueden ser adicionados para realizar acciones diferentes o complementarias.
Empezaremos iniciando 2 terminales, en la primera lanzaremos el nodos maestro con el comando roscore y en la segunda colocaremos el comando rosrun turtlesim turtlesim_node para inicializar un nodo del paquete.
En la primera terminal colocamos el comando roscore.

Vemos como emerge una tortuga en un canvas de fondo azul.



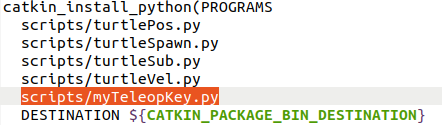
Empezaremos creando el Script myTeleopKey.py dentro del paquete Hello_turtle, para ello podemos desde Visual Studio Code (VSC) abrir la carpeta en nuestro espacio de trabajo donde se encuentra nuestro paquete Hello_turtle y en el interior de esta abriremos la carpeta Scripts, allí guardaremos nuestro archivo.
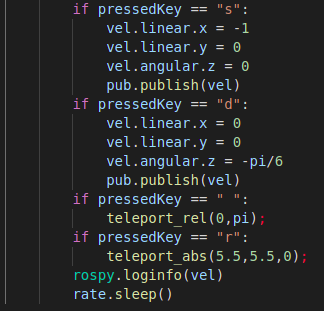
Ahora en nuestro Script, importaremos las librerías que nos permitirán manipular el influjo de eventos de entrada, por ejemplo, el modulo termios, la librería cliente para ROS, rospy, así como aquellas vinculadas a servicios que nos permitirán manipular la posición de la tortuga, ofrecidos en el paquete Hello turtle, por ejemplo, los módulos TeleportAbsolute, TeleportRelative y Twist.
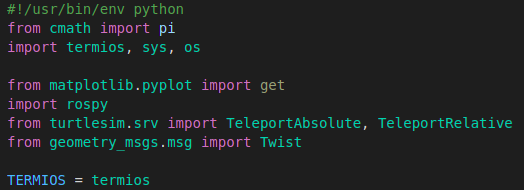
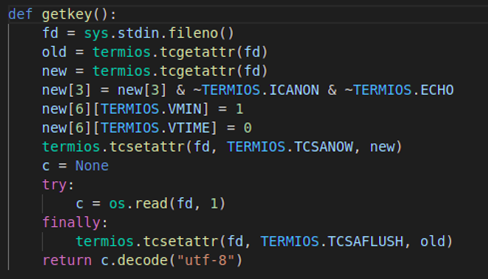
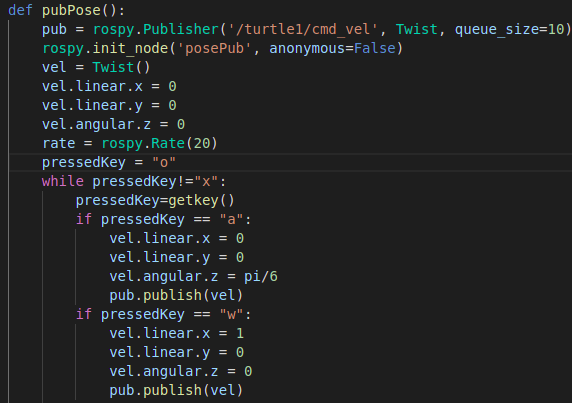





- La elección apropiada de la librería así como la forma de manipular sus objetos es importante a la hora de trabajar con eventos del teclado en Python, esto porque algunas librerías no tienen un buen rendimiento en Lynux y porque algunas clases de los módulos de control del teclado, detienen la ejecución normal del programa por esperar el evento de entrada del teclado.
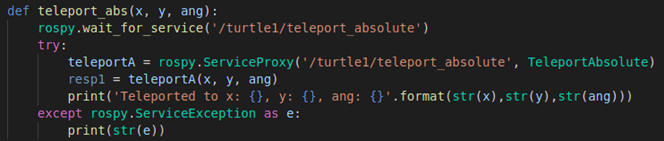
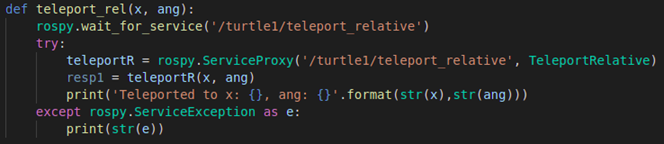
- Es importante reconocer los diferentes servicios asociados a los nodos que interactúan en ROS, esto con la intención de conocer los métodos necesarios para el envío y adquisición de información entre ellos y lograr con ello la gestación de estrategias de control personalizadas, como la implementada en este laboratorio.