
KKswarm

KKswarm logo
开源机器人集群项目KKSwarm,由易科机器人实验室和阿木实验室联合匠心打造。
KKSwarm项目旨在为研究人员搭建一个高效、易用的集群研究平台。结合ROS强大的开源生态,让研究人员或者工程师能够快速上手开发。同时也兼顾到理论研究和工程落地之间的跨度,KKSwarm项目通过搭建轻量级的仿真环境,再通过参数拟合让仿真和真实环境一致,让仿真环境和真实环境高度匹配,可以实现多智能体等算法的直接过渡,配合上低成本的机器人集群,可以快速在物理环境中验证算法,以达到工程落地的目的。
KKSwarm项目通过视觉定位,获取当前机器人的位置和方向。然后根据当前位置和方向,通过算法来控制其下一步的行为。
KKSwarm,致敬Kevin Kelly机器社会进化论,一个奉行极简主义的自组织机器人集群,具有丰富的机器人功能,如视觉、控制、学习、协同。同时追求超低成本、超大规模,致力于使群 体智慧走进物理世界。众多低成本机器人互相连接,进而产生他们的信息交流和反馈,相互学习,产生 秩序,以达到集体目标,Kevin Kelly将其称为“群智涌现”。
KKSwarm项目正在成长之中,目前已正式推出的功能有:
- 独创的全局视觉定位系统,为大规模机器人集群提供低成本、高精度定位服务
- 提供基于
MATLAB/simulink仿真与算法开发环境,可一键生成ROS代码并部署至KKSwarm机器人系统 - 提供KKSwarm集群协同simulink模板,可快速上手集群功能
- 提供KKDeep深度强化学习Simulink模板,免去繁琐的环境配置,训练后控制器可一键生成代码部署至机器人集群
- 提供ROS rviz在线可视化功能,直观展示集群运行情况
- 提供Matlab ROS 日志分析功能,方便采集数据进行分析,提升研发效率
- 支持虚拟雷达,低成本实现复杂分布式算法测试
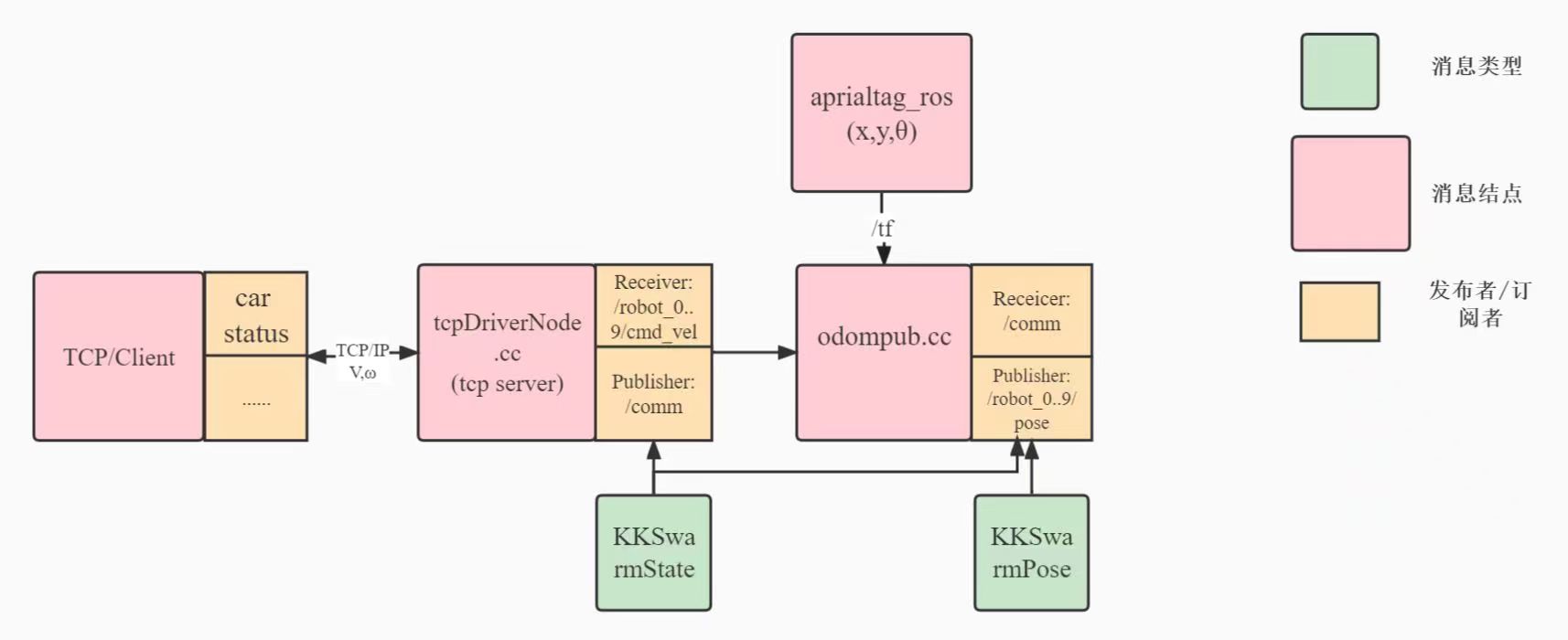
系统数据流向图
kkswarm项目通过路由器搭建局域网,集群小车为客户端。所有的算法和定位系统均在服务器主机上进行计算。然后通过TCP/IP协议,将控制指令发送给集群小车,从而控制小车的运动。同时主机服务器通过摄像机实时获取集群小车的位置和方向。
ubuntu18.04 以及 ROS Melodic
git clone https://github.com/kkswarm/kk-robot-swarm- 进入海康威视官网,选择
机器视觉工业相机客户端MVS V2.1.0(Linux)进行下载
注意
根据实际情况,版本可能有小更新。选择
机器视觉工业相机客户端MVS V2.1.x (Linux)。本项目使用的是 2.1.0版本
-
下载完成以后,解压。解压后将会显示适应各种架构的计算机的压缩包。这里选择
MVS-2.1.0_x86_64_20201228.tar.gz这个压缩包进行安装。 -
解压第2步选择的压缩包
tar -xvzf MVS-2.1.0_x86_64_20201228.tar.gz cd MVS-2.1.0_x86_64_20201228 sudo bash setup.sh相机驱动将会安装在
/opt/MVS中启动相机界面的命令为
cd /opt/MVS/bin ./MVS.sh相机驱动的动态链接库路径为
/opt/MVS/lib/64相机驱动头文件路径为
/opt/MVS/include/ -
安装完毕后,将海康威视的动态库加入到系统动态库中。否则程序将无法运行。
cd /etc/ld.so.conf.d sudo vim hik.conf ## 如果不会vim,则输入 sudo gedit hik.conf #在第一行加入相机驱动的动态链接库路径 /opt/MVS/lib/64 sudo ldconfig # 刷新配置
KKSWARM 项目采用的标签家族是 Tag36h11,尺寸是7cm。 详情见 doc/apritags1-50.pdf。您也可以通过软件自动生成该家族标签。详情点击通过openmv生成apriltag标签
sudo apt install python3-pip
pip3 install numpycd ~/kk-robot-swarm/
git clone https://github.com/AprilRobotics/apriltag.git
cd apriltag
mkdir build
cmake ..
make -j4
sudo make install- Apriltag相关头文件将会被安装在
/usr/local/include/apriltag - Apriltag相关的库将会被安装在
/usr/local/lib/ - 有关Apriltag,可以访问其 Github主页获取更多信息
cd ~/kk-robot-swarm
catkin_makeecho "source ~/kk-robot-swarm/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc









