Troubleshooting
In certain cases, it can happen that when you try to power off YuMi there is a write error, such that the current state of the tasks and motion planner is not saved properly. This can lead to a system failure state when you power on the robot, that prevents you from running the RAPID modules.
To bring your YuMi back to normal, follow these steps:
- Install ABB RobotStudio in a PC with Microsoft Windows.
- Connect your YuMi robot to the PC with RobotStudio.
- Open ABB RobotStudio and choose the "Controller" tab.
- Click on Add controller, and enter the IP address of YuMi (by default
192.168.125.1) - Once YuMi has been detected, ask for write permission, which should be granted using the FlexPendant.
- Perform a B-restart from ABB RobotStudio.
The system should restart in a normal state (not failure), without any RAPID tasks loaded. To load again the RAPID tasks follow the instructions in Firmware, or, if you have one of RPL YuMi's (500577, 500693 or 500694), proceed to restore the respective backup.
Everytime you power on the YuMi, or you close the YuMi ROS nodes running on your PC, you need to run the RAPID files again (they are Normal tasks inside the IRC5 controller due to safety reasons). To do this, follow the steps described in Starting the RAPID scripts
Below is a common error that appears on the FlexPendant.
Event Message 71367
No communication with I/O device
Description
During Start-up no communication was established ...
...
This is a common issue with YuMi robots that may come up in three different scenarios:
- When powering on YuMi. The robot attempts to communicate with the grippers, and the connections gets dropped. Nonetheless, YuMi quickly re-establishes the connections.
- If there is any type of unexpected network traffic (as ping messages) to the YuMi controller, or the grippers.
- If the grippers are not properly attached to YuMi.
Be sure to press Acknowledge on the FlexPendant screen each time it appears. Furthermore, if it happens while running the RAPID files, restart them.
For safety reasons, YuMi has a motion supervision module loaded by default. Motion supervision is the name of a collection of functions for high sensitivity, model-based supervision of the robot. It contains the function for load supervision, jam supervision, and collision detection. Because the supervision is designed to be very sensitive it may trip if there are large process forces acting on the robot. (Source: ABB Robotics)
If motion supervision triggers, all RAPID tasks are stopped automatically, you will need to restart the ROS nodes for YuMi.
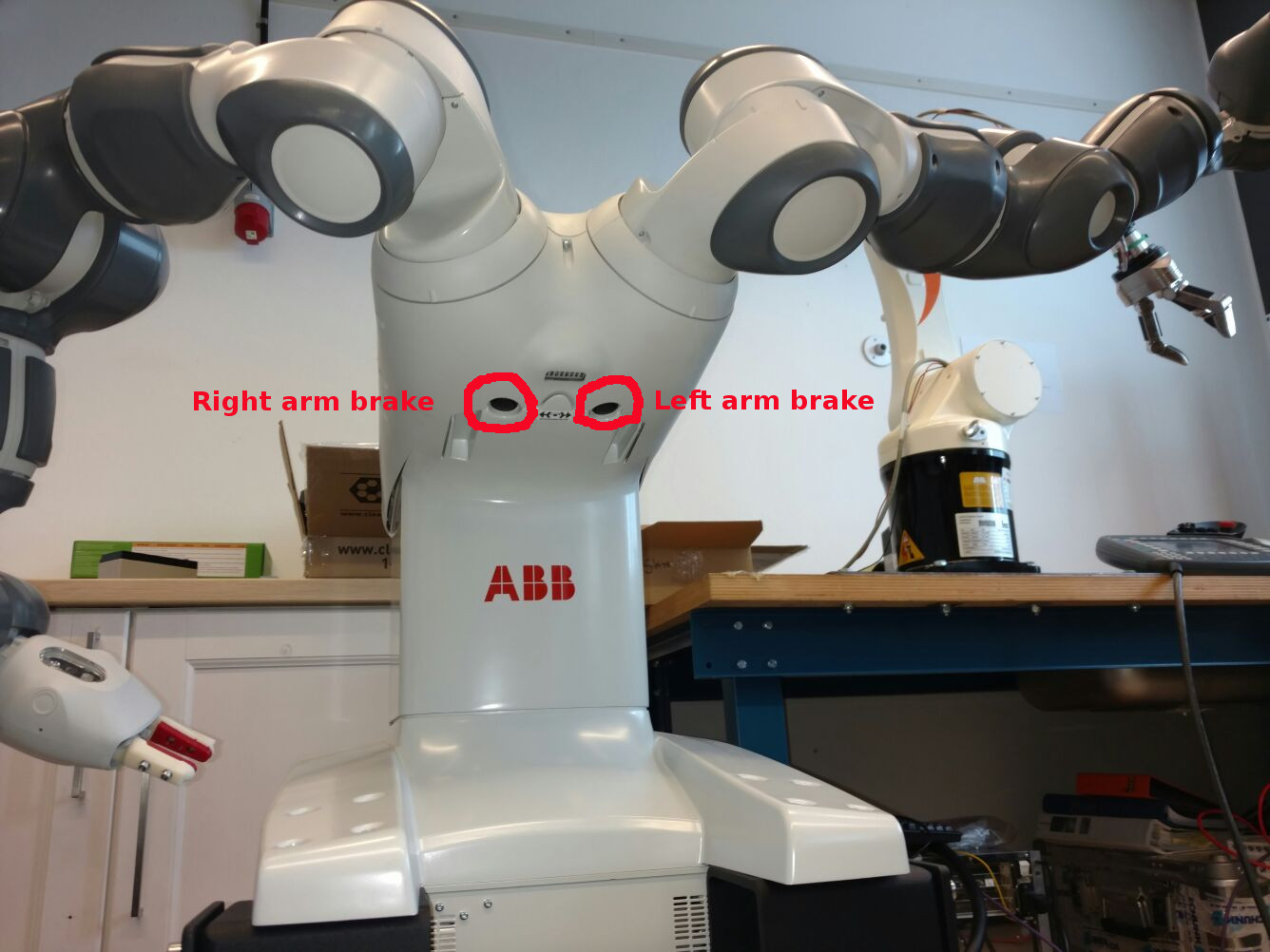
While controlling the YuMi arms you have to be aware of the joint limits (see the YuMi URDF or Datasheet). If you get really close to their values, motion supervision will be triggered, and all rapid tasks will be stopped. Most of the time you will need to turn the motors off, release the joint brakes, and re-position the joints in such a way that they are far from their limits.
{kind=link}
The YuMi grippers tend to get very warm when performing opening and closing operations. Hence, it is strongly recommended, to send them a zero effort command when they are not being used.
This is crucial to take into account if you are using 3D printed grippers.
If you want to gather information about EGM performance, you can do so by subscribing to the following topics:
/yumi/egm_control_period
Might be a problem with ros_control/ros_controllers. Install from source.