Husky
- Computer: Dell OptiPlex 3070 i7.
- Switch: Netgear GS308E

Currently the switch, with the camera connected to it is not plugged in !
Diagram saved at : Husky_network.drawio
.
├── Desktop
│ └── credentials.txt
├── libraries
│ ├── libnabo
│ ├── libpointmatcher
│ ├── norlab_controllers
│ └── norlab_icp_mapper
└── ros2_ws
├── build
├── install
├── log
└── src
├── audio_common
├── drive
├── husky
├── imu_tools
├── joint_speed_filter
├── libpointmatcher_ros
├── LSC16
├── norlab_controllers_ros
├── norlab_icp_mapper_ros
├── norlab_imu_tools
├── norlab_robot
├── norlab_xsens_driver
├── odom_to_pose_converter
├── pointcloud_motion_deskew
├── service_caller
└── wiln
Norlab robot is a general package that's shared between all robots using ROS in the Northern Robotics Laboratory: norlab_robot.
| Sensor | Brand | Model |
|---|---|---|
| Lidar | Leishen | LS-C16 |
| IMU | Xsens | MTI-100 |
| Camera (x6) | Basler | a2a1920-51gcpro |
| Microphone | Audio-Technica | ATR4650-USB |
| Depth Camera | Intel Realsense | D435 |
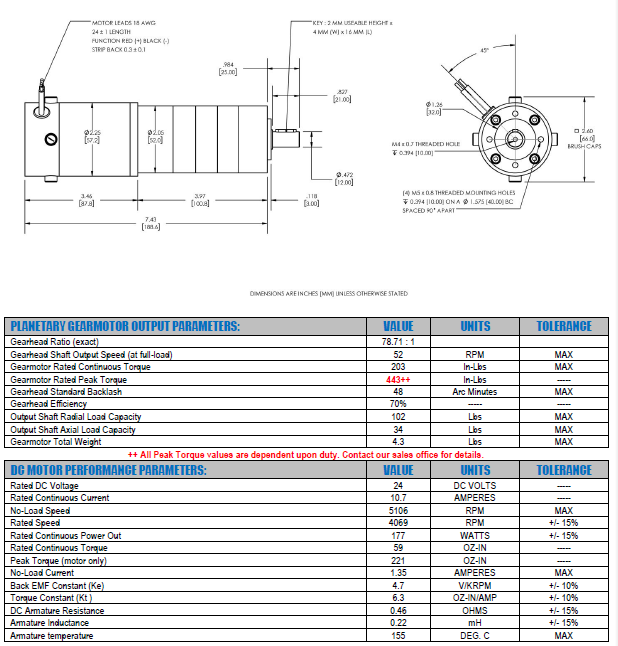
The Husky utilizes MMP S22-346F-24V GP52-079 motors with the following parameters :
The motors are sharing a shaft with these encoders. These encoders have the reference US Digital E2-1024-375-IE-D-G-B
The Husky is equipped two MDL-BDC24 motor drivers in a controller / device configuration. Communication between both drivers is done through a CAN bus (120 ohm resistors are plugged on each side), while communication with the main onboard computer is done through a serial port.
Baseline: 0.55 mWheel radius: 0.165 m