why should we do this when searching free cell #32
Comments
|
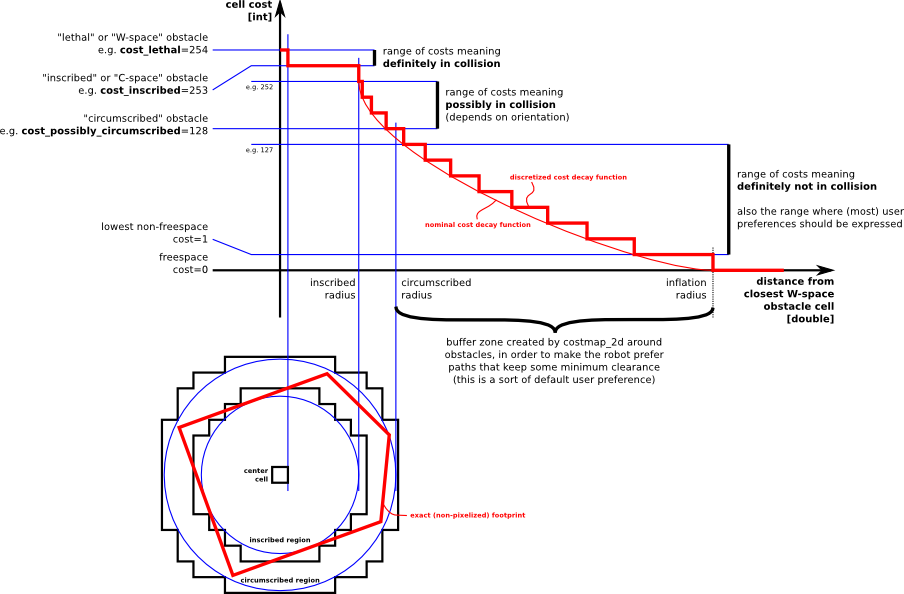
Did you see the wiki about costmap_2d here? |
|
There's a two 'features' at play here, both existing to enable frontier search even when the 'initial' search cell is not strictly FREE_SPACE. https://github.com/paulbovbel/frontier_exploration/blob/lunar-devel/src/frontier_search.cpp#L47 tries to find a clear cell nearby to start the search. https://github.com/paulbovbel/frontier_exploration/blob/lunar-devel/src/frontier_search.cpp#L62 will always expand the breadth-first-search to neighbour cells that are cheaper or equal cost. This prevents the search from climbing into higher-cost areas, but has the (potential) downside of sidling along a non-zero-cost ledge around the starting point if necessary. I would be open to providing a flag to disable one or both of these features, but they are still very necessary to frontier-search in non-optimal conditions. |
|
Good! thanks for fast and kind reply :) |
|
@zwkcoding yes,you're right the cost value that is less than INSCRIBED_INFLATED_OBSTACLE is not safe.I have found this and then I change the |
{kind=link}
|
@paulbovbel thank you for your reply! But on my opinion, the performance breath-first-search algorithm is not ideal when the costmap updates it's values with inflation_layer . when my robot try to go through the narrow area , the bfs can't found frontiers because the cost value == FREE_SPACE are very few and surrounded by the cost value between 0 to 253 . the bfs will not climbing into higher-cost areas ,so I didn't find a solution when I change the https://github.com/paulbovbel/frontier_exploration/blob/lunar-devel/src/frontier_search.cpp#L62 to |
i have a little bit of confusion about line 61 in frontier_search.cpp
map_[nbr] <= map_[idx]We have found the variable idx ,it is the FREE_SPACE that is nearest to the start. nbr is the nhood4 for idx.
On my opinion.it should be
map_[nbr] < INSCRIBED_INFLATED_OBSTACLEnotmap_[nbr] <= map_[idx]if we wanna search the free cell from the idx,because the cost values between 0 to 253 is free,is that right?
I am not sure,I am looking forward to your reply,thank you !
The text was updated successfully, but these errors were encountered: