Home
A cheap, snap-together, nearly screw-less self-replicating 3D printer (reprap) design that minimizes use of non-printed parts. Current parts cost: under $275! That's including the cost of plastic used to print the parts.
- Snappy v1.1 is live and in the wild!
- Snappy v2.0 works, but the Z axis is wobbly.
- Snappy v3.0 is verified working, though the X axis vibrates over much.
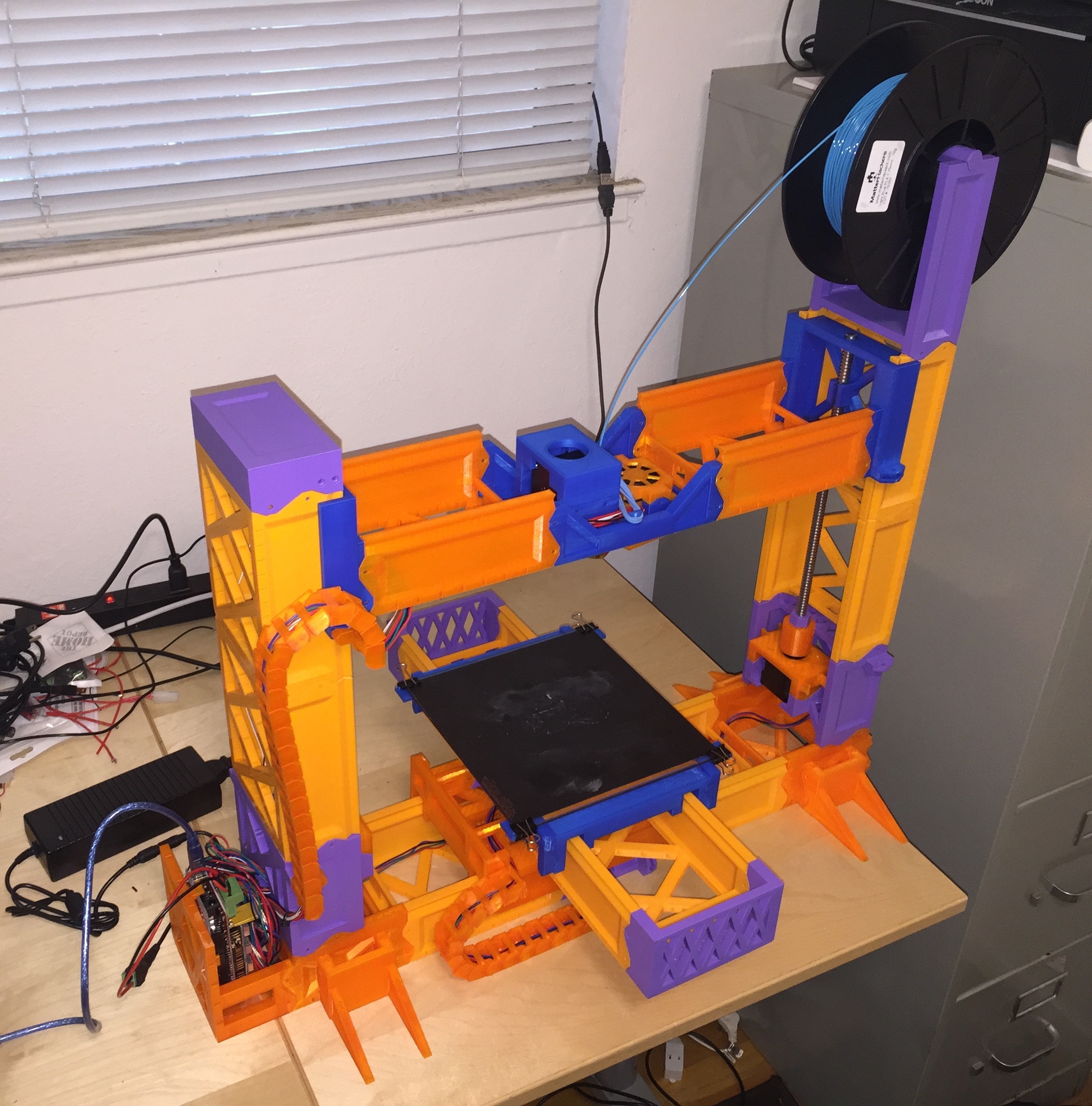
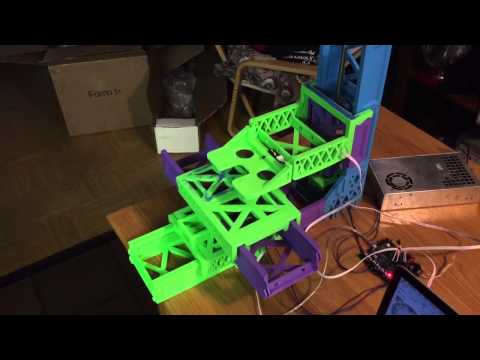
2018-02-02 Snappy 3.0 is now a verified working design! I'm currently printing parts on it to test self-replication now.
--
2018-01-10 Checked in initial design for Snappy 3.0. Changes to a lifter rod design with bottom mounted motors for less weight on the bridge, and less wobble in the Z axis.
--
2017-05-16 Renamed v1.5 to v2.0 to reflect the major changes in the design. This design is nearing finalization.
--
2017-04-06
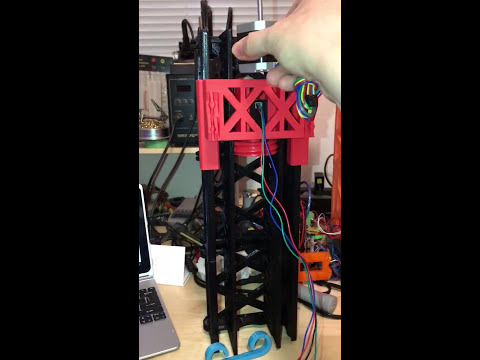
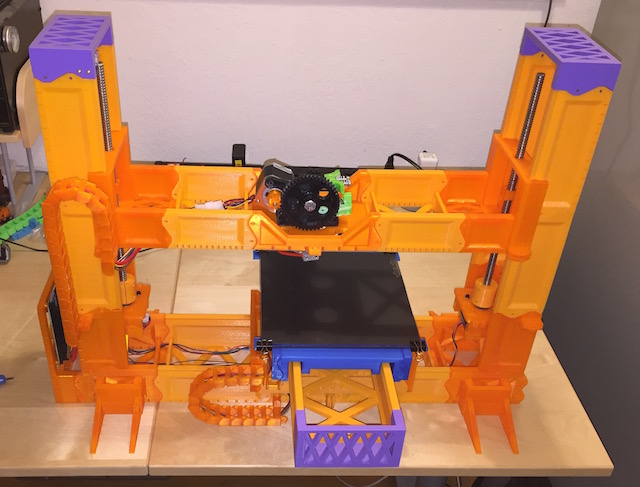
Successful first live test of the new Z axis work screw lifter system!
--
2017-03-29
I was inspired and figured out how to get rid of the two metal lifter rods on the Snappy. Snappy v1.5 is now under development with a new Z-axis design.
Here's a sneak preview:

--
2017-03-18 Just found out (by Google search) that the Snappy 3D printer made it into the 2017 Guiness Book of World Records as the "Most 3D-printed 3D Printer." Google Books reference
--
2015-09-30
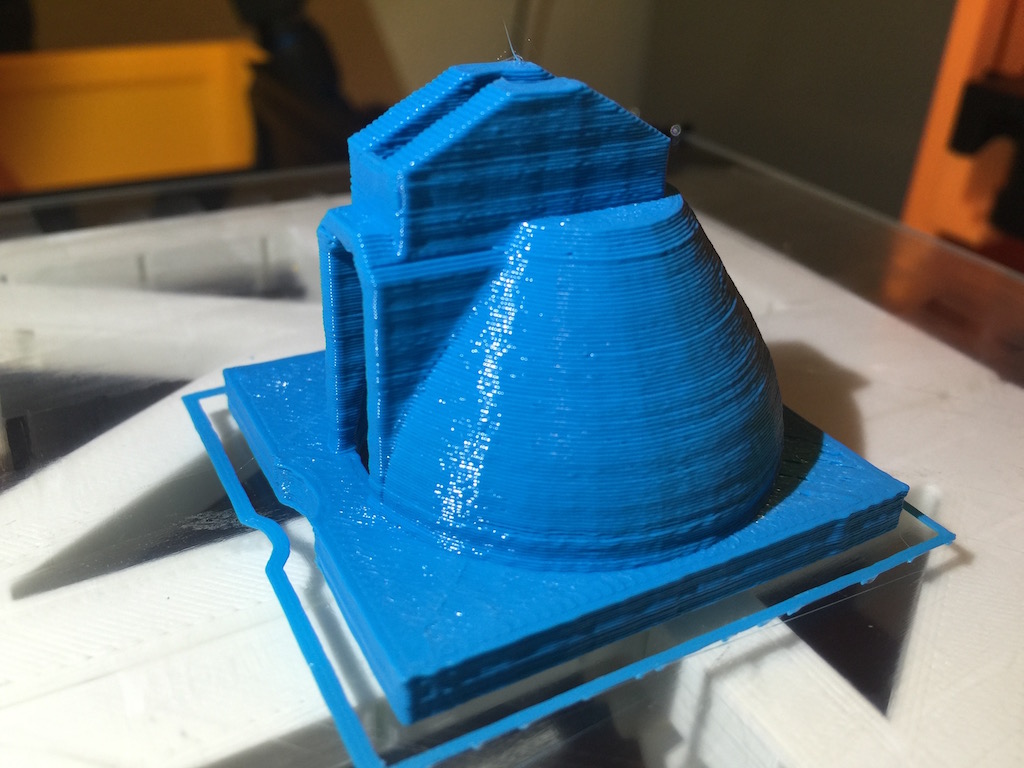
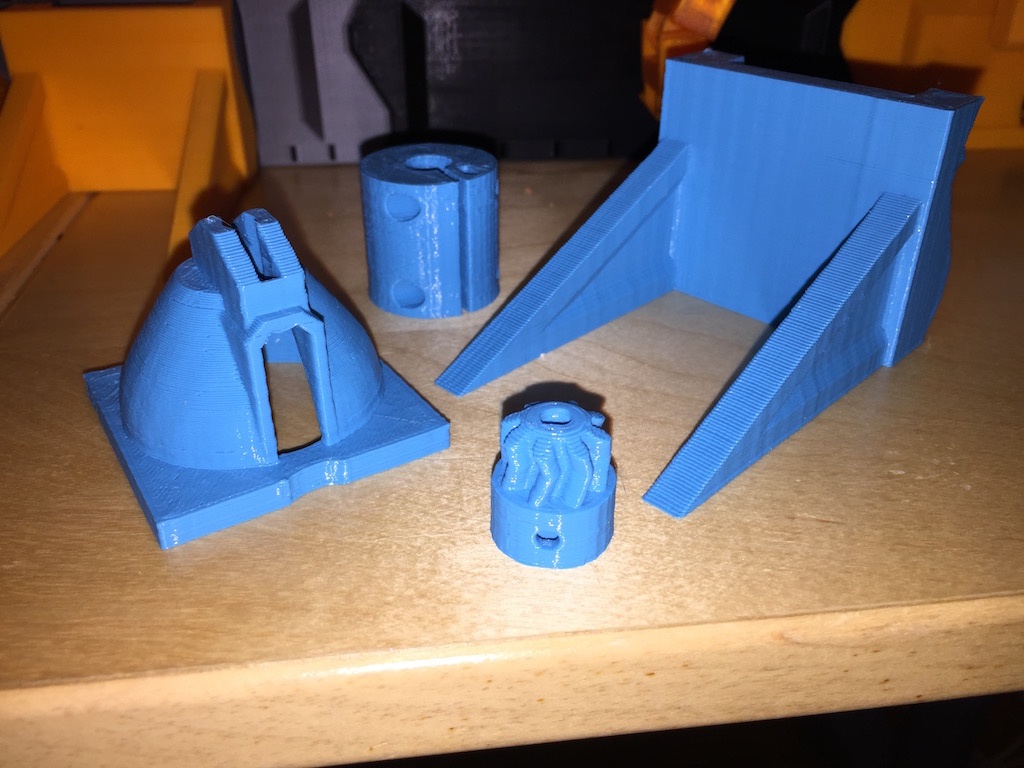
Here's video of the Snappy 1.1c in action!
And photos of the some parts printed on it:
--
2015-09-22
Tweaking the rails and sliders has resulted in good improvements to motion smootheness. Win!
The direct-drive Z axis, however, has not worked out. I've tried a number of variations on it, to no success. I've not been able to get this working, so I regretfully am reverting back to using lifter rods. So much fail!
On the plus side, going back to the lifter rods makes it work again, and we're still under $300.
--
2015-08-24
Currently undergoing tweaks to improve accuracy and print quality. Lots of iterative improvements.
The entire design, as it exists on github at the moment, is almost entirely screw-less. The only remaining screws are two M2.5 screws to hold the Z limit switch, a pair of ACME threaded lifter rods, and the screws holding the stepper motors and extruder hot-end together.
It occurs to me that since I am using two motors for the Z axis anyways, I may be able to remove the lifter rods, and use direct rack-and-pinion drive.
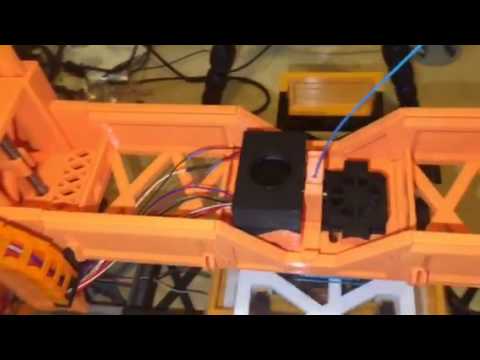
The extruder is now completely printable in PLA!
Here's the a photo of the full build so far.
--
2015-07-12
It's Alive! Mwahahahaha!

--
2015-07-03
Success! I was able to get clean full motion from the dual tower design. Now if only my extruder weren't clogged.
--
2015-06-25
New design uses two lifter rods and two rails for the Z axis instead of the previous single-sided cantilever design. Hopefully this will eliminate most of the wobble.
--
2015-01-??
The direct drive design for the Z axis did not work at all. Gearing down the Z axis seems like a very error prone design, upon further thought. Back to the drawing board.
--
2014-10-31
I've assembled a prototype Snappy RepRep, and was able to run it through some motion tests. It works! Mostly. The Z axis wobbles a hell of a lot with the lifter screw, so I'm abandoning that design, and will try a direct drive approach. I was able to turn the printer on it's side, and it was still able to drive the X and Y axes against gravity, so I think that should work for the Z axis as well. If tests prove otherwise, I can always try gearing down the Z Axis.
--
2014-09-03
The eponymous snap joiners have been tested under fire! They take a fair bit of pressure to get to snap into place, but can be joined by hand. For this test, I connected three Z platforms together and put a hefty weight on the end. Once attached, they were solidly together, and didn't even wiggle. Given that the rail parts used for the extruder cantilever have even larger/stronger joiners, and fewer joints are needed, I no longer worry about it holding up!

--
2014-08-31
The X/Y slider got it's first motorized test, and it's a success!
