no robot seen when i run the moveit tutorial #3006
Comments
|
Thanks for reporting an issue. Because we're a volunteer community, providing a pull request with suggested changes is always welcomed. |
|
Typically such display issues are due to the OpenGL in use. Please, could you provide more details about your specific setup? |
|
Thanks for quick response! Everything looks ok (there is a empty grid chart) except the robot not seen. |
|
The logs don't indicate an issue. I suspect issues with WSL2 and OpenGL. |
|
@rhaschke, today i fresh-installed a VM(Ubuntu20.04) in VirtualBox and go through the same steps, and the robot can be shown properly, so as you said that may be an issue in my WSL2 and OpenGL. For now i can use my VirtualBox VM to go forward. Thanks for your help! |
|
I run into this problem either, it was the same as the issue in wslg issue 554 , seems that ogre3d in wslg can't work very well. Like the advice given in that issue, by temporary set |
Description
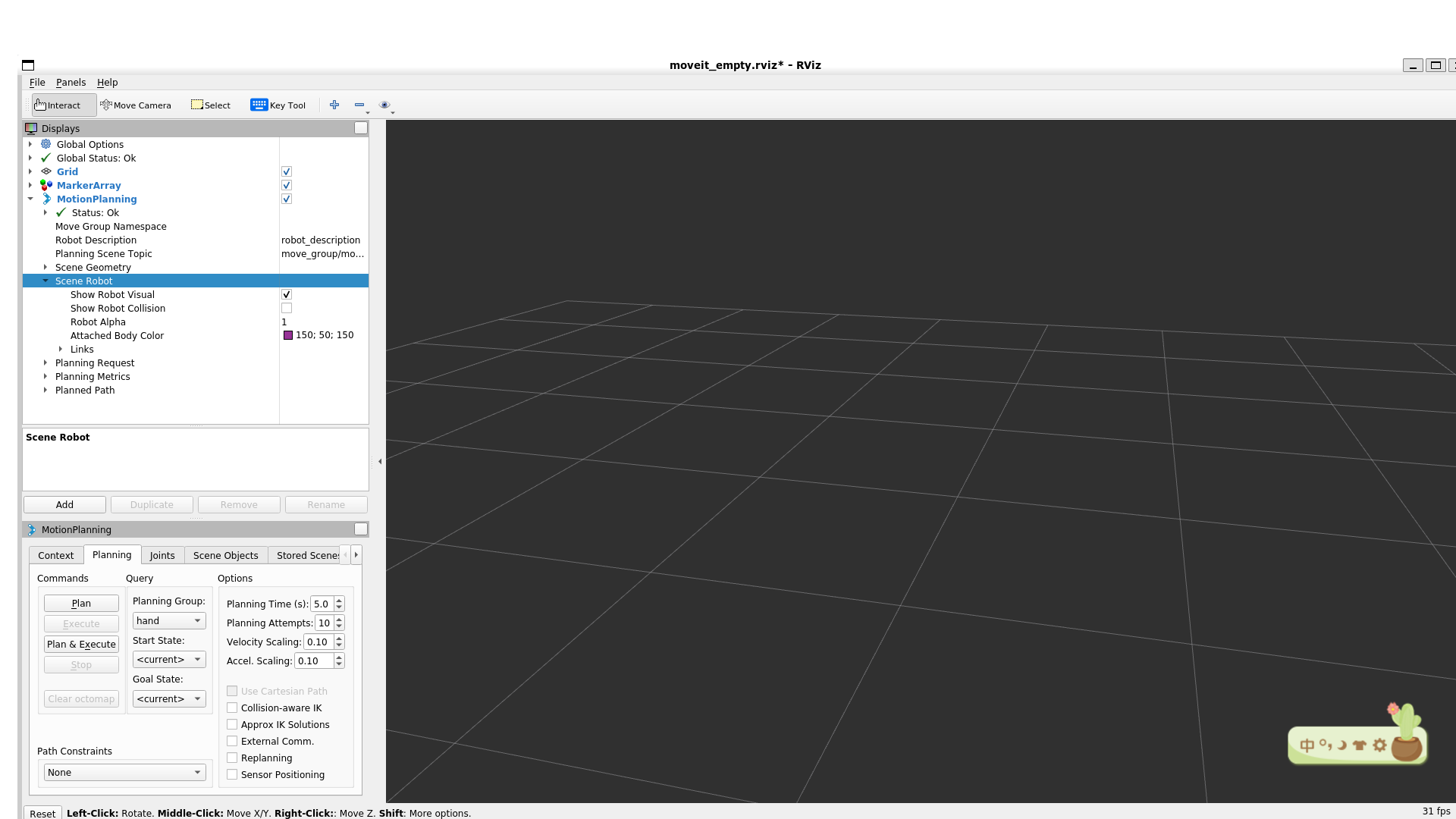
i start to learn by going through this link https://ros-planning.github.io/moveit_tutorials/doc/quickstart_in_rviz/quickstart_in_rviz_tutorial.html, but cannot see the robot mentioned here - "You should now see the Panda robot in RViz:"
Your environment
Steps to reproduce
first go through this: https://ros-planning.github.io/moveit_tutorials/doc/getting_started/getting_started.html
then go through this: https://ros-planning.github.io/moveit_tutorials/doc/quickstart_in_rviz/quickstart_in_rviz_tutorial.html
Expected behaviour
cannot see the robot
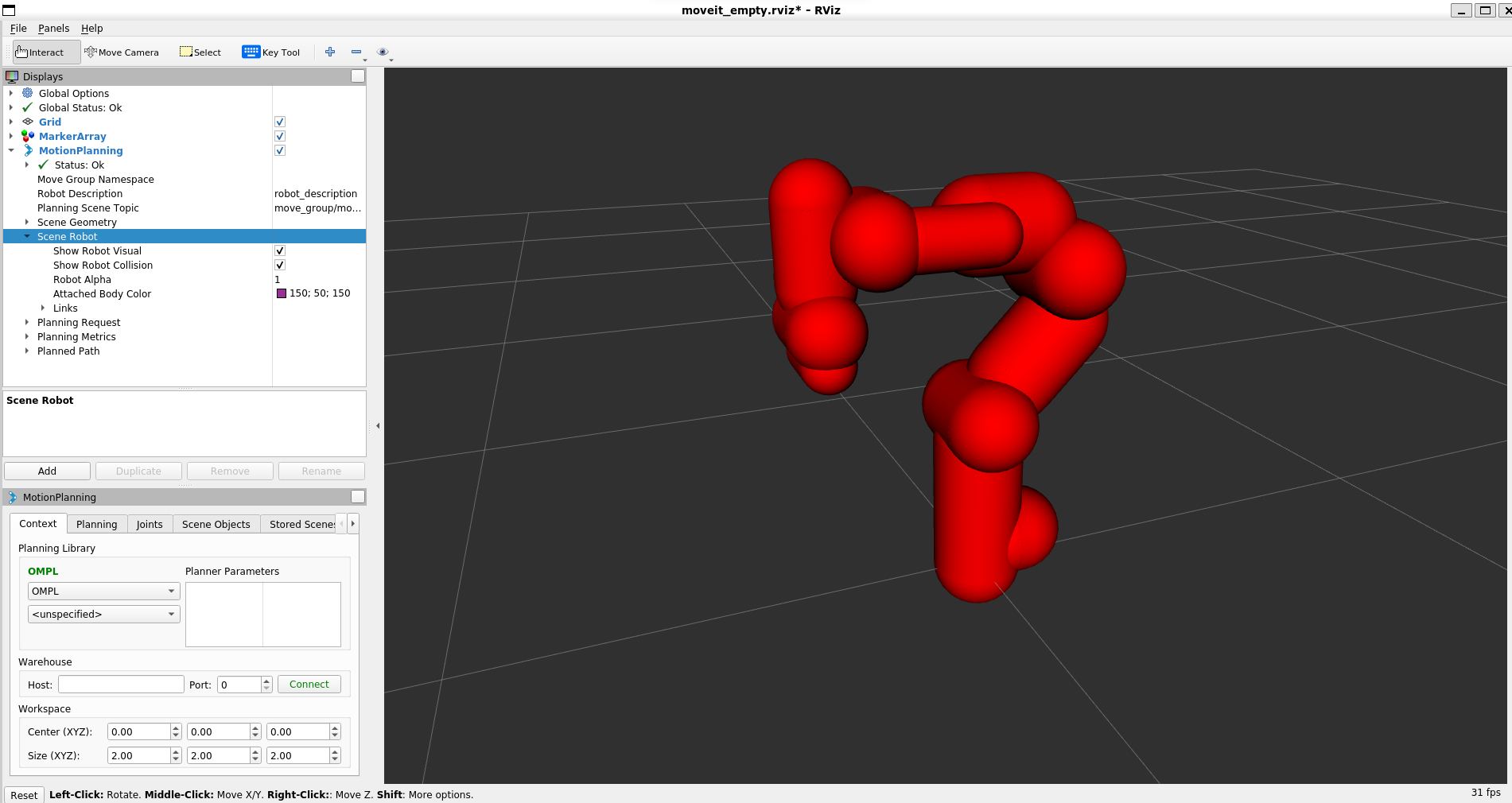
then i check the 'Show Robot Collision' under 'Motion Planning folder', a red pipe-like robot appear but it looks not a real robot, quite abstract.
Actual behaviour
Tell us what happens instead
Backtrace or Console output
You can start planning now!
[ INFO] [1640013940.964509939]: rviz version 1.14.13
[ INFO] [1640013940.964564902]: compiled against Qt version 5.12.8
[ INFO] [1640013940.964572580]: compiled against OGRE version 1.9.0 (Ghadamon)
[ INFO] [1640013940.971327842]: Forcing OpenGl version 0.
[ INFO] [1640013943.931013498]: Stereo is NOT SUPPORTED
[ INFO] [1640013943.931108535]: OpenGL device: D3D12 (NVIDIA GeForce MX450)
[ INFO] [1640013943.931163572]: OpenGl version: 3.1 (GLSL 1.4).
[ INFO] [1640013965.344652355]: Loading robot model 'panda'...
[ WARN] [1640013965.344969704]: Link panda_leftfinger has visual geometry but no collision geometry. Collision geometry will be left empty. Fix your URDF file by explicitly specifying collision geometry.
[ WARN] [1640013965.345053534]: Link panda_rightfinger has visual geometry but no collision geometry. Collision geometry will be left empty. Fix your URDF file by explicitly specifying collision geometry.
[ INFO] [1640013965.423813077]: Starting planning scene monitor
[ INFO] [1640013965.427060119]: Listening to '/move_group/monitored_planning_scene'
[ INFO] [1640013965.892332548]: No active joints or end effectors found for group 'hand'. Make sure that kinematics.yaml is loaded in this node's namespace.
[ INFO] [1640013965.894481227]: No active joints or end effectors found for group 'hand'. Make sure that kinematics.yaml is loaded in this node's namespace.
[ INFO] [1640013965.904558469]: Constructing new MoveGroup connection for group 'hand' in namespace ''
[ INFO] [1640013967.048063098]: Ready to take commands for planning group hand.
Use gist.github.com to copy-paste the console output or segfault backtrace using gdb.
add the screenshot:
The text was updated successfully, but these errors were encountered: