Some issues have been notified regarding the voltage levels. Note that the BB and BBB ADC are 1.8 Volts maximum.
This ROS package publishes the Sharp IR sensors values to a ROS topic. For now the following sensors are supported:
-
GP2Y0A21 Distance Sensor (10-80cm) [
scripts/GP2Y0A21YK0F.py] -
GP2Y0D810Z0F Digital Distance Sensor (10cm) [
scripts/GP2Y0D810Z0F.py] -
GP2Y0D805Z0F Digital Distance Sensor (5cm) [
scripts/GP2Y0D805Z0F.py]
Note that this package makes use of the adafruit-beaglebone-io-python library.
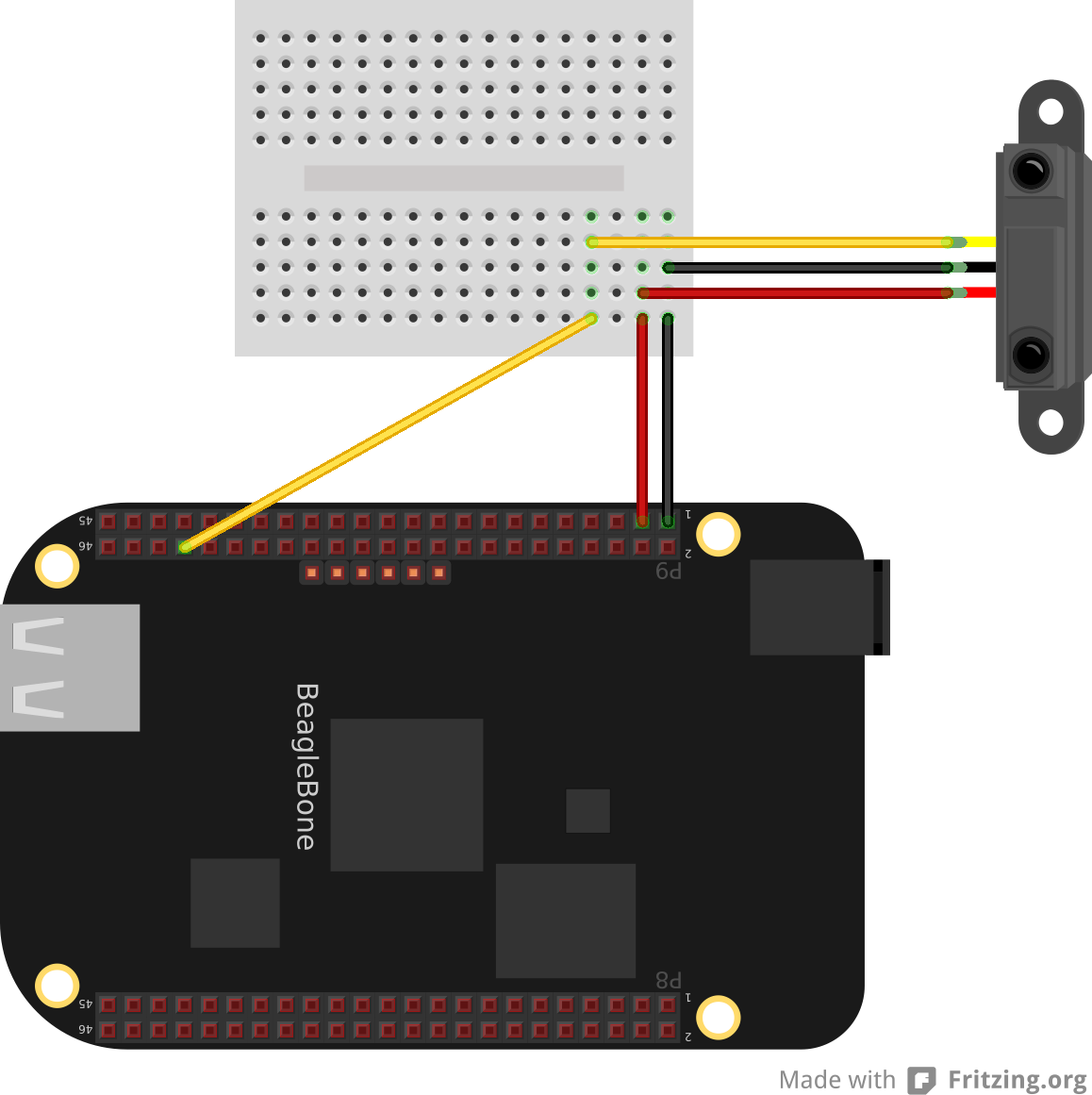
####gp2y0a21yk0f ROS node that reads a Sharp IR gp2y0a21yk0f sensor (analog sensor) and publishes its output to a topic. The code is configured so that the sensor is connected to P9_40. (Needs to use ADC). The information published can be interpreted as distance. The sensor is able to recognize objects from 10cm to 80cm. #####Published topics ir_sharp_80cm (std_msgs.msg String)
####gp2y0d805z0f ROS node that reads a Sharp IR gp2y0d805z0f sensor (digital sensor) and publishes its output to a topic. The code is configured so that the sensor is connected to the Beaglebone P8_14. The node publishes whether the sensor detects and object within its range (5 cm). #####Published topics ir_sharp_5cm (std_msgs.msg String)
####gp2y0d810z0f ROS node that reads a Sharp IR gp2y0d810z0f sensor (digital sensor) and publishes its output to a topic. The code is configured so that the sensor is connected to the Beaglebone P8_14. The node publishes whether the sensor detects and object within its range (10 cm). #####Published topics ir_sharp_10cm (std_msgs.msg String)