CudaSoftCollisions is a library that allow you to detect self collisions in a tetrahedrical mesh that is deformed over time.
- Get all the dependencies you need
- Clone the project :
git clone https://github.com/Mieos/CudaSoftCollisions.git- Build the project :
mkdir build
cd build
cmake ..
makeThis library is doing fast model collision detection using two main tricks:
- First, we reduce the search space dimension by only considering tetrahedron which have a face on the surface of the polyhedra
- Second for each tetrahedron independantly (on GPU), we first check the intersection of circumsphere before checking intersection between tetrahedron (much faster) using the method of separating axes
This library provides different test in bin/tests/unit to check if the collision is working properly
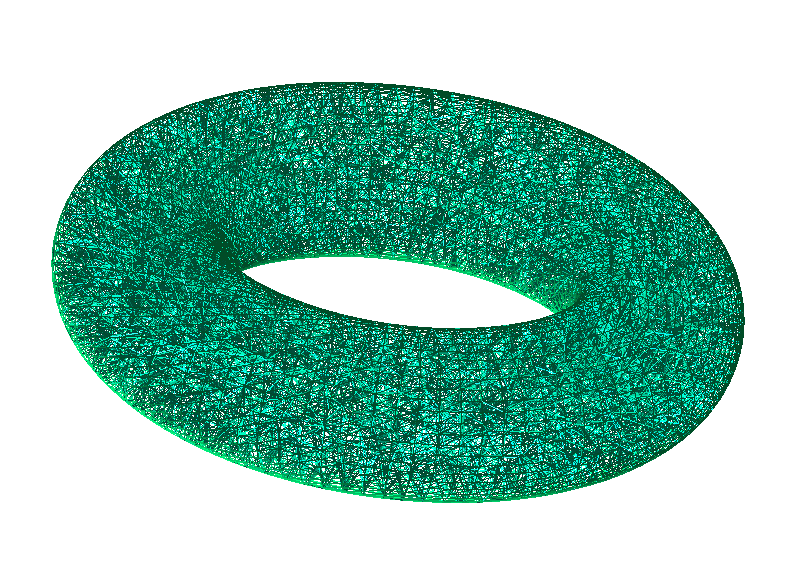
- uTest_extractSurfaceVolume : extract the surface of a polyhedra and save it as data/meshes/test.ply (in the exemple it is a torus)
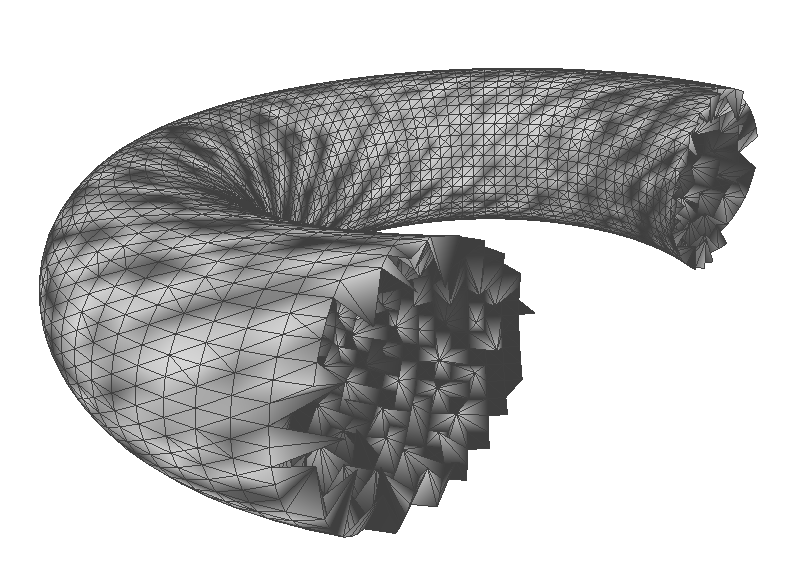
- uTest_extractModelFromFile : extract all the tetrahedron of a polyhedra that have a face on the surface and save it as data/meshes/test3Dmodel.ply
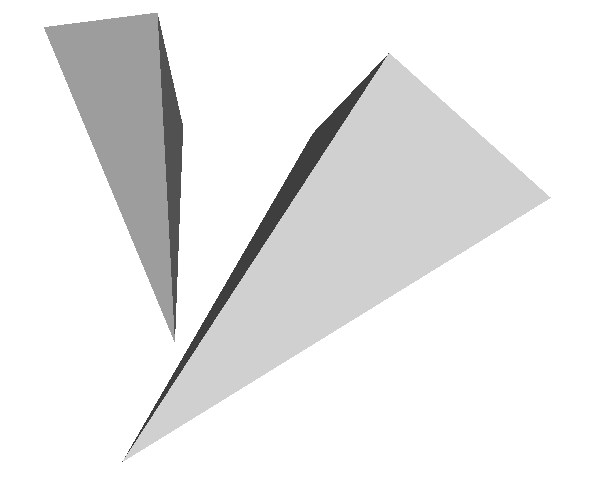
- uTest_simpleCollision : simple collision test
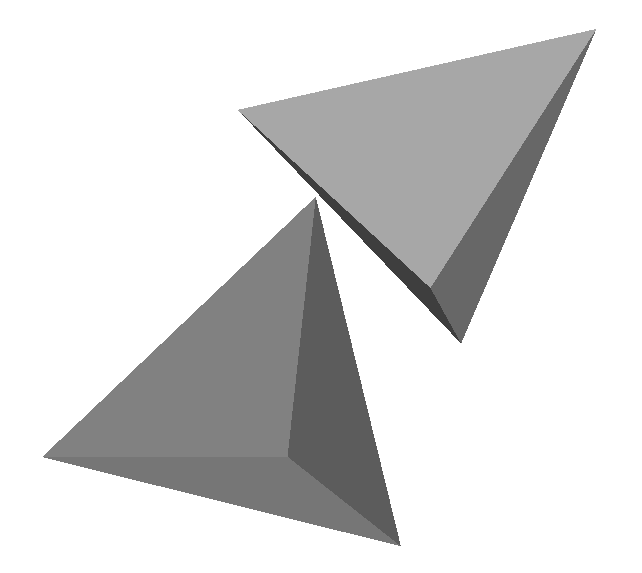
- uTest_collisionTwoTet : collision between two tetrahedra (with and without collision)
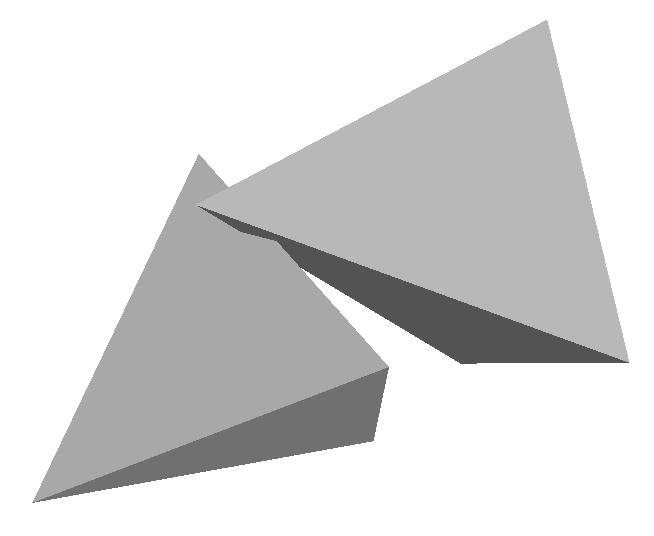
- uTest_trickyCollision : tricky configuration without collision
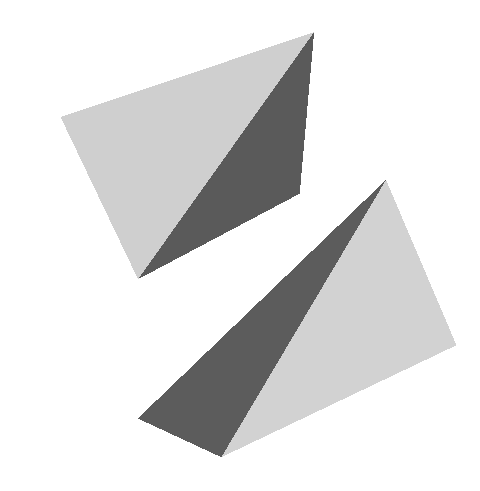
- uTest_trickyCollision2 : tricky configuration 2 without collision
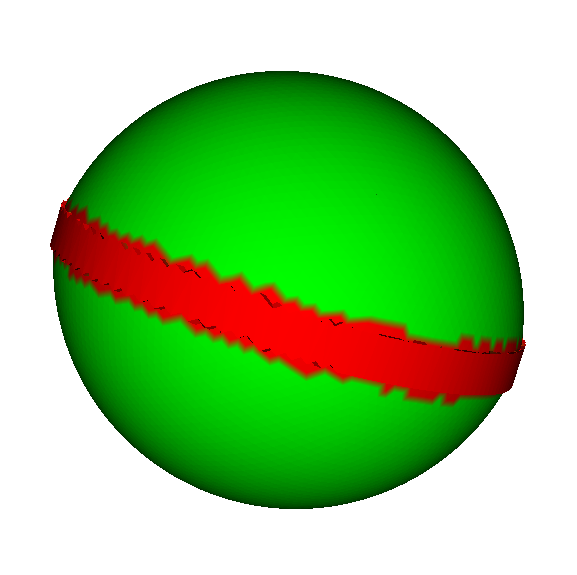
- uTest_sphereCollision : check the collisions in a sphere (before and after adding collision) and save the result as data/meshes/intersectingSphere.vtk
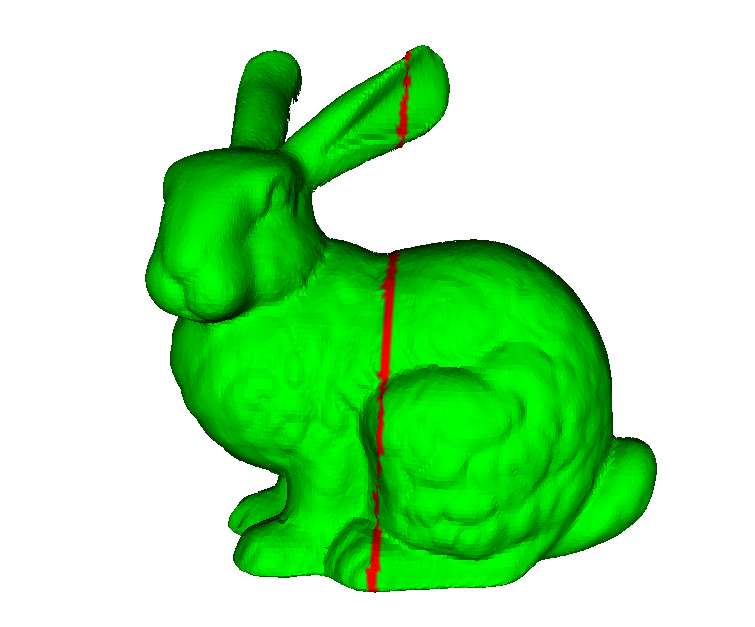
- uTest_bunnyCollision : check the collisions in a bunny (before and after adding collision) and save the result as data/meshes/intersectingBunny.vtk
- Compute the epsilon used in the intersection test instead of using a default one
- Faster collision function but that use more gpu memory (not the priority for now)