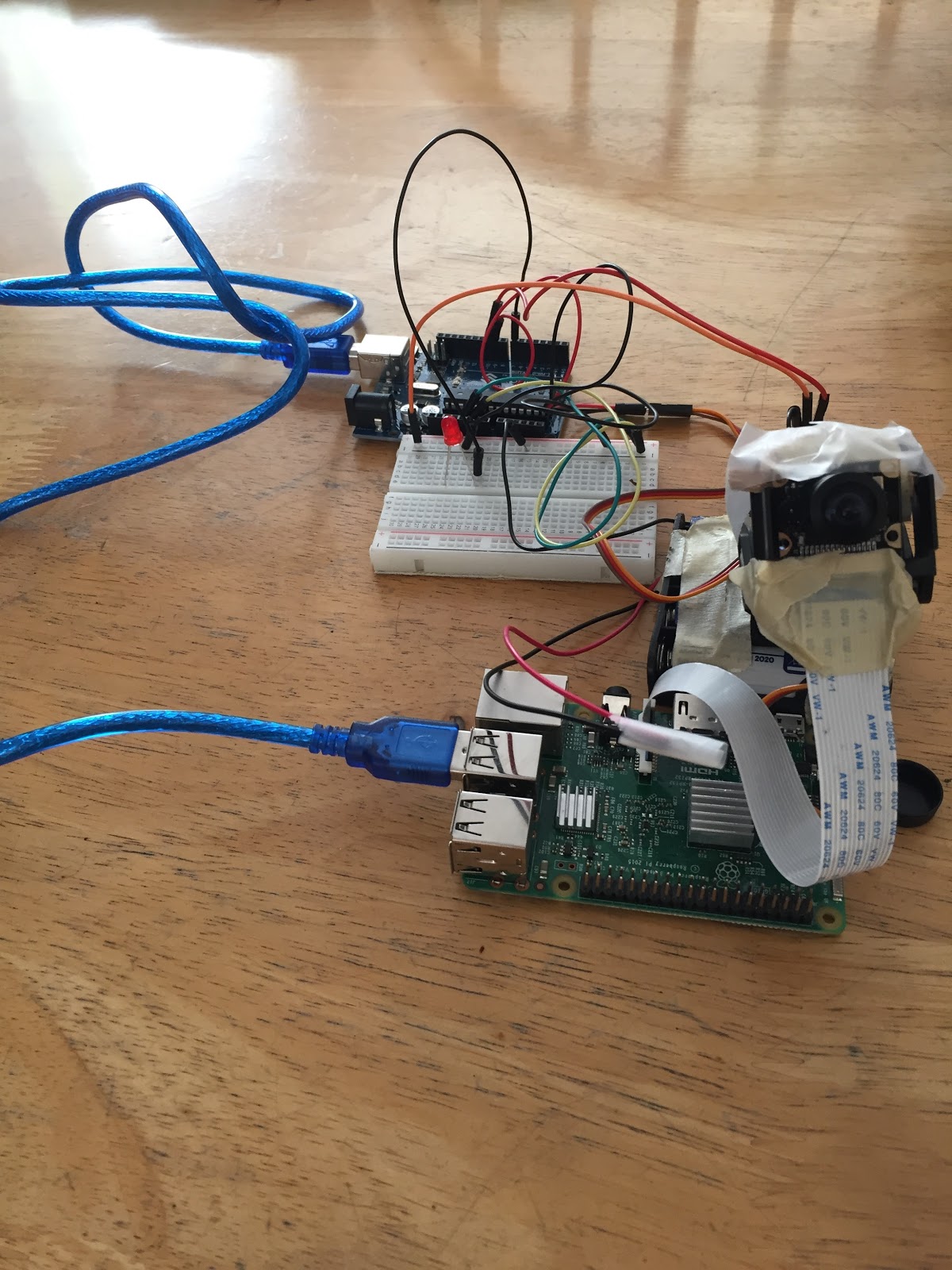
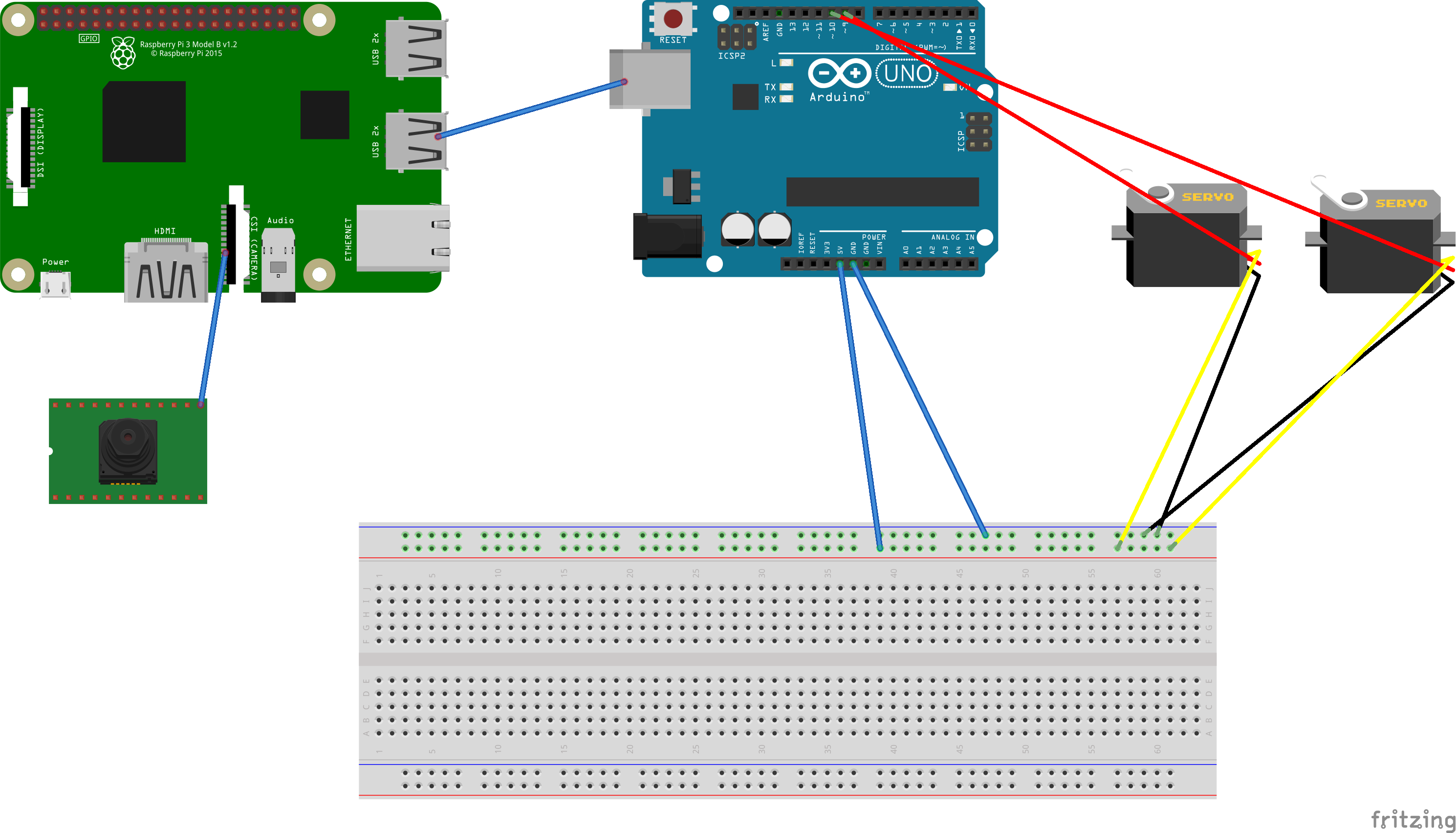
The Object-Tracking-Camera takes inputs from a camera mounted on a set of servos and uses the information to position the camera so that
the object it is tracking remains in the center of the frame. The servos are controlled by an Arduino microcontroller, which in turn
receives inputs from a Raspberry Pi that processes the video feed from the camera.
The Python code is a modified version of code from the following website:
https://www.pyimagesearch.com/2015/09/14/ball-tracking-with-opencv/


- Camera sends image to computer (Raspberry Pi)
- Computer analyzes image. Looks for objects of specific size, color, appearance, etc
- If desired object is detected, Computer sends output (Message to Arduino)
- Arduino moves servos based on message received
- Repeat sequence from Step 1
- Computer loads in a single frame from camera video feed
- Frame is blurred using a Gaussian Blur filter to remove noise
cv2.GaussianBlur - Computer scans all pixels in blurred frame
cv2.inRange. All pixels outside of desired color range are set to black, while those within the color range are set to white. - Image is eroded
cv2.erodeto further remove noise - Image is dilated
cv2.dialateto reset object to original size - Find object contours
cv2.findContoursto determine if there are any objects in color range - If object found, determine where it is in the frame by looking at where its center is
- Based on where center is, update servo position variables.
- Send updated servo positions to arduino over the USB serial connection (arduino.write)
- Arduino sets servo position based on the received position message
- Next frame is loaded and process repeats
- Import Servo library
- Initialize servos to set position (center horizontal, 25 degrees down)
- Loop: a. Read message from Raspberry Pi using Serial Monitor b. Set new servo position based on message
These arguments can be applied when the software is run to change the parameters that the software uses to detect objects.
The two screen size arguments (-x, -y) adjust the size of the screen in pixels. Smaller screen sizes run faster but have less precision in detecting objects. I found that resolutions above 640x480 slowed down the object detection considerably and thus were not useful for this application
The object size argument (-s) sets the smallest possible radius in pixels an object needs to be before it will be detected. Smaller sizes are more likely to detect objects but are also more likely to detect background clutter as objects and thus introduce more noise.
The camera framerate argument (-f) sets how fast the camera sends images to the computer in frames per second. Higher framerates lead to greater responsiveness but take up more computer resources. Above a certain framerate (in the case of the pi, 32), the increased resource usage overtakes the faster image loading speed, negating its benefits
Under optimum conditions (even lighting, clean background), the camera had no issue tracking the objects. But under less-than-optimal conditions (uneven, excessively bright, or low lighting), the camera would sometimes not detect the object, even when the object in question was only a foot in front of it.
In the next semester, I would like to further develop the image processing capability of my programming, incorporating some or all of the listed features:
- If no object is found for 5 seconds, pan area to look for objects. If no object is found, return to the rest position
- If an object is found, turn on LED. If the object is lost and the camera is panning, LED blinks. When panning stops, turn the LED off.
- Modify code to be able to read QR codes instead of detecting color. Color detection is heavily dependent on lighting, but QR codes can be read in almost any different lighting. The camera will be able to read a QR code and print its message/link and stop processes for people to read/copy message
In addition, I plan to design an autonomous vehicle (either line-following or obstacle-avoidance). with the camera mounted on top of the vehicle to track objects as the vehicle is moving, which will serve as a prototype for a self-driving vehicle.