For tutorial, visit my Medium here
Do you want to learn robot, but you don't have money to buy the robot? Webots robot simulator is the solution!
You can learn with any kind of robots, any kind of 3D environments. Also you can create your custom robots and environment. The most interesting is Webots is free and open source.
This repository contain a list of tutorial to learn about robot, implement on e-puck robot, and simulated on Webots Robot simulator.
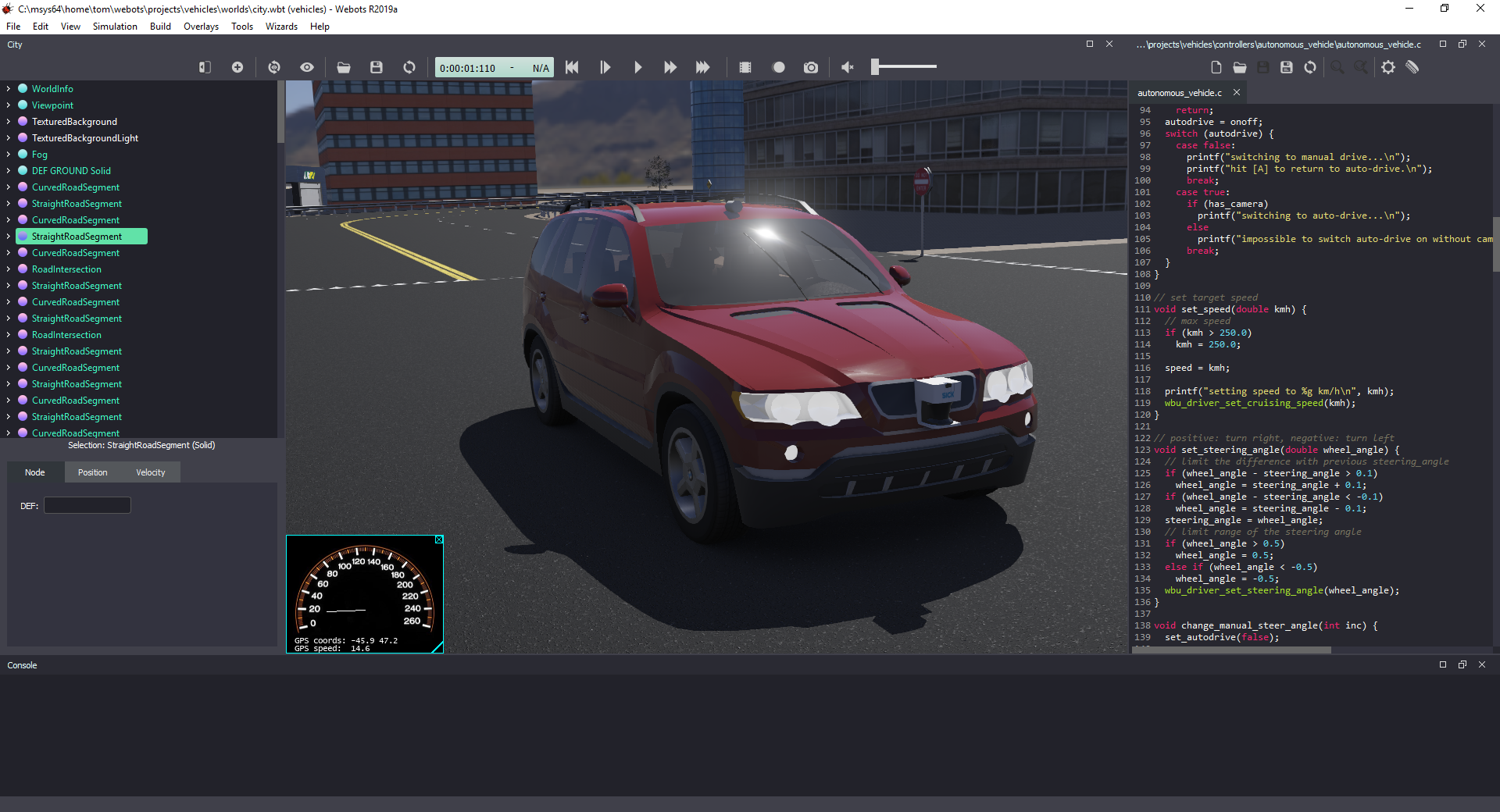
Webots is an open source robot simulator that provides a complete development environment to model, program and simulate robots. Thousands of institutions worldwide use it for R&D and teaching. Webots has been codeveloped by the Swiss Federal Institute of Technology in Lausanne, thoroughly tested, well documented and continuously maintained since 1996. It is the most efficient solution to quickly get professional results. Reference

The e-puck robot is a mini mobile robot developed by GCtronic and EPFL. The e-puck robot is designed and has been widely used in research and educational purposes and is easy to use Reference.
e-puck has been a very successful robot since 2005. About 3000 units used both in education and research. From January 2018 version 2 is available Reference.
The e-puck robot is a non-holonomic wheeled robot. Non-holonomic wheeled robot is a robot that depends on the path it can reach to move and cannot move in all directions Reference, different from the holonomic wheeled robot that can move in all directions Reference without changing its orientation. Therefore, if the e-puck robot wants to move to a different direction, the e-puck robot must rotate its body first to face that location.
If you have any question, feel free to contact me at email or Linkedin
Copyright 2019 Albert Alfrianta
Licensed under the Apache License, Version 2.0 (the "License");
you may not use this file except in compliance with the License.
You may obtain a copy of the License at
http://www.apache.org/licenses/LICENSE-2.0
Unless required by applicable law or agreed to in writing, software
distributed under the License is distributed on an "AS IS" BASIS,
WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
See the License for the specific language governing permissions and
limitations under the License.