Bingyuan Liu, Ismail Ben Ayed, Adrian Galdran, Jose Dolz
To Appear at CVPR 2022
[option] create a new virtual env
conda create -n mbls python=3.8.10
It's recommended to install torch and torchvision tailored to your environment in advance. The torch versions I have tested are 1.10.0+cu111 and 1.7.1+cu110.
pip install -e .
The required libraies are already included in steup.py.
For CIFAR-10, our code can automatically download the data samples. For the others (Tiny-Imagenet, CUB-200 and VOC 2012), please refer to the official cites for downloading the datasets.
Important Note : Before you run the code, please add the absolute path of the data directory for the related data configs in configs/data. Or you could pass it in the running commands.
python tools/train_net.py --help
train_net is powered by Hydra.
== Configuration groups ==
Compose your configuration from those groups (group=option)
data: cifar10, cub, newgroups, tiny_imagenet, voc
loss: ce, focal, focal_adaptive, logit_margin, ls, mmce, penalty_ent
model: deeplabv3, global_pooling, resnet101, resnet101_cifar, resnet101_tiny, resnet110, resnet110_cifar, resnet34, resnet34_cifar, resnet34_tiny, resnet50, resnet50_cifar, resnet50_tiny
optim: adam, sgd
scheduler: multi_step, plateau, step
wandb: my
== Config ==
Override anything in the config (foo.bar=value)
data:
name: cifar10
data_root: DATA_PATH
batch_size: 128
object:
trainval:
_target_: calibrate.data.cifar10.get_train_valid_loader
batch_size: ${data.batch_size}
augment: true
random_seed: ${seed}
shuffle: true
num_workers: 4
pin_memory: true
data_dir: ${data.data_root}
test:
_target_: calibrate.data.cifar10.get_test_loader
batch_size: ${data.batch_size}
shuffle: false
num_workers: 4
pin_memory: true
data_dir: ${data.data_root}
model:
name: resnet50
num_classes: 10
pretrained: true
has_dropout: false
object:
_target_: calibrate.net.resnet.build_resnet
encoder_name: ${model.name}
num_classes: ${model.num_classes}
pretrained: ${model.pretrained}
has_dropout: ${model.has_dropout}
loss:
name: ce
ignore_index: -100
object:
_target_: torch.nn.CrossEntropyLoss
ignore_index: ${loss.ignore_index}
reduction: mean
optim:
name: sgd
lr: 0.1
momentum: 0.9
weight_decay: 0.0005
nesterov: false
object:
_target_: torch.optim.SGD
lr: ${optim.lr}
momentum: ${optim.momentum}
weight_decay: ${optim.weight_decay}
nesterov: ${optim.nesterov}
scheduler:
name: multi_step
milestones:
- 150
- 250
gamma: 0.1
object:
_target_: torch.optim.lr_scheduler.MultiStepLR
milestones: ${scheduler.milestones}
gamma: ${scheduler.gamma}
verbose: true
wandb:
enable: false
project: ''
entity: ''
tags: ''
task: cv
device: cuda:0
seed: 1
log_period: 10
train:
clip_grad_norm: true
max_epoch: 200
resume: false
keep_checkpoint_num: 1
keep_checkpoint_interval: 0
calibrate:
num_bins: 15
visualize: false
test:
checkpoint: ''
save_logits: false
Powered by Hydra (https://hydra.cc)
Use --hydra-help to view Hydra specific helpOurs :
python tools/train_net.py \
log_period=100 \
data=tiny_imagenet \
data.data_root=/home/bliu/work/Data/tiny-imagenet-200 \
model=resnet50_tiny model.num_classes=200 \
loss=logit_margin loss.margin=10.0 loss.alpha=0.1 \
optim=sgd optim.lr=0.1 optim.momentum=0.9 \
scheduler=multi_step scheduler.milestones="[40, 60]" \
train.max_epoch=100Cross entropy (CE) :
python tools/train_net.py \
log_period=100 \
data=tiny_imagenet \
data.data_root=/home/bliu/work/Data/tiny-imagenet-200 \
model=resnet50_tiny model.num_classes=200 \
loss=ce \
optim=sgd optim.lr=0.1 optim.momentum=0.9 \
scheduler=multi_step scheduler.milestones="[40, 60]" \
train.max_epoch=100Label smoothing (LS) :
python tools/train_net.py \
log_period=100 \
data=tiny_imagenet \
data.data_root=/home/bliu/work/Data/tiny-imagenet-200 \
model=resnet50_tiny model.num_classes=200 \
loss=ls \
optim=sgd optim.lr=0.1 optim.momentum=0.9 \
scheduler=multi_step scheduler.milestones="[40, 60]" \
train.max_epoch=100It is straightfoward to include the self-contained module logit_margin_l1 in your framework.
The core idea is simply a few lines of code:
loss_ce = self.cross_entropy(inputs, targets)
# get logit distance
diff = self.get_diff(inputs)
# add linear penalty where logit distances are larger than the margin
loss_margin = F.relu(diff-self.margin).mean()
loss = loss_ce + self.alpha * loss_margin
Besides the implementation of our paper, this library could support follow-up works on model calibration with the following features:
- Calibration evaluator, e.g. ECE and AECE
- Reliability diagram
- Experiments tracking with wandb
More instructions will come soon. Please stay tuned! Thank you.
@inproceedings{liu2022mbls,
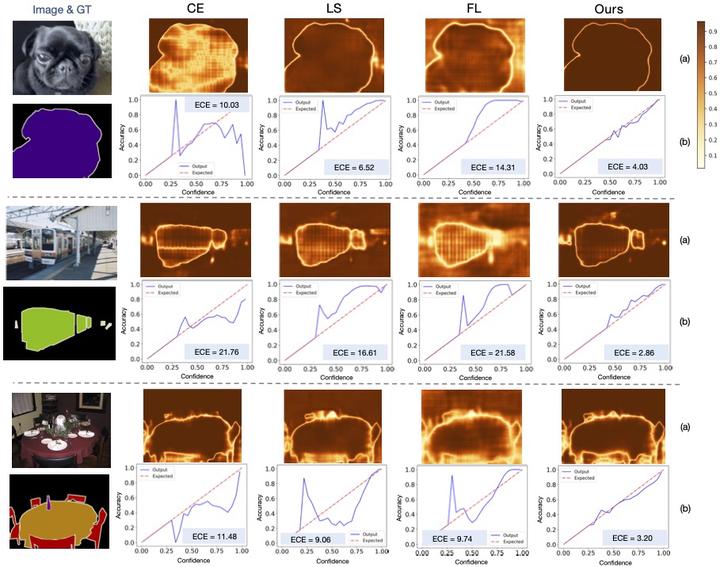
title={The Devil is in the Margin: Margin-based Label Smoothing for Network Calibration},
author={Bingyuan Liu and Ismail Ben Ayed and Adrian Galdran and Jose Dolz},
booktitle = {CVPR},
year={2022},
}