Home
The CPSwarm Launcher is a GUI application to help users of CPSwarm system to navigate through the design workflow, launch different components and organize asset files within a project.
The landing page of the launcher to create a project or open an existing one:
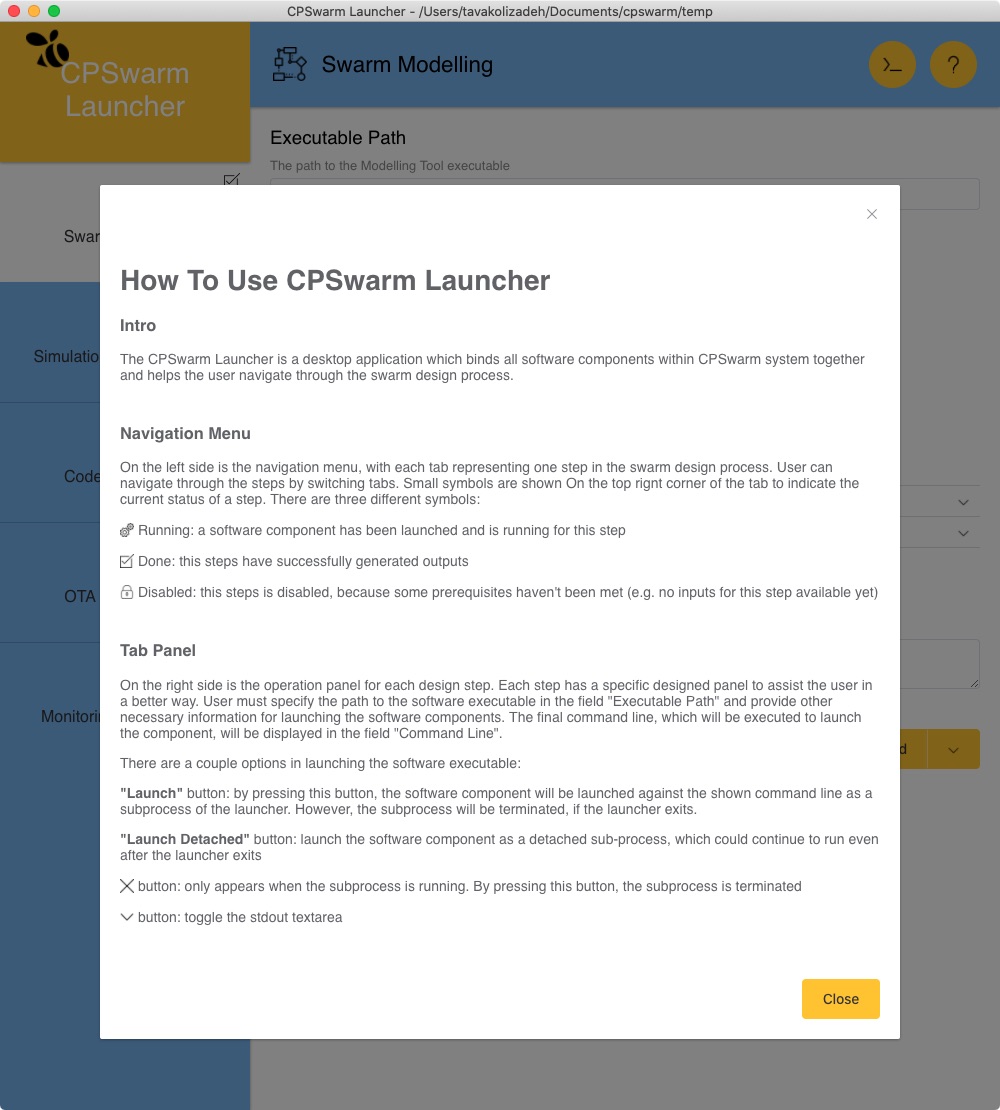
The help button provides information of how to use the launcher:
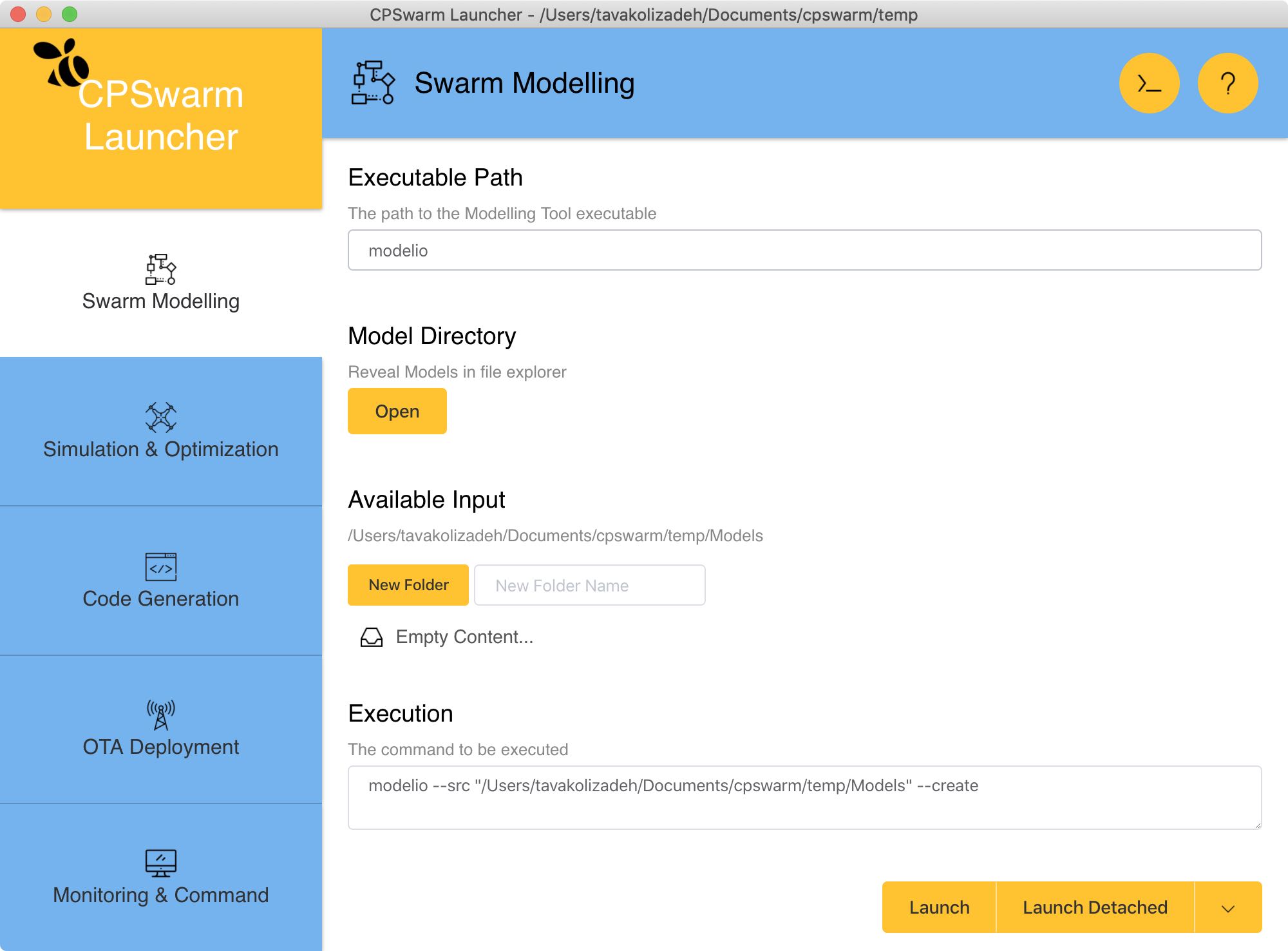
For modelling, the launcher enables selection of an existing project or creating a new one before launching the Modelling Tool:
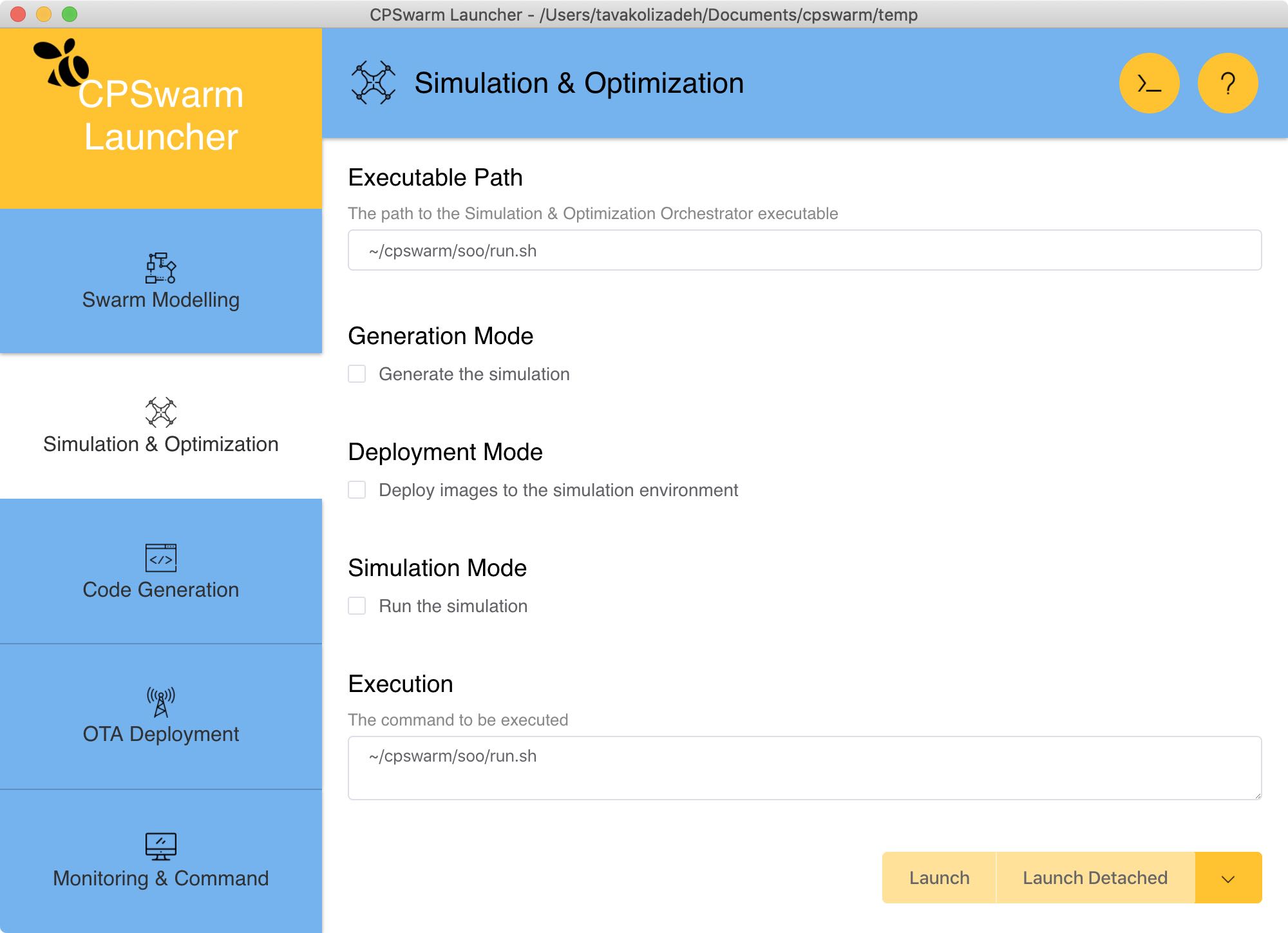
The launcher can be used to run the Simulation and Optimization Orchestrator (SOO). The main parameters that the user can indicate using the interface are the following:
- Mode in which the SOO can be run:
- Generation Mode: the SOO is used to generate the simulation code to be used to run the desired simulation.
- Deployment Mode: the SOO is used to deploy the Simulation Managers (SM)s and eventually the Optimization Tool (OT), in the nodes of the cluster. This mode depends on a Kubernetes cluster, pre-installed by the user.
- Running Mode: the SOO is run using the SMs already installed to execute the simulation or optimization.
- Both Deployment and Running Modes: the SOO deploys the needed SMs in the cluster and then executes the required task.
- The type of the task:
- Simulation: the default mode in which the SOO simulate the behavior in one SM.
- Optimization: using an OT, the behavior is optimized running multiple simulation distributed on the available SMs suitable for the required simulation task.
- Parameters to be set for the OT (only in case of optimization).
- Requirements needed to run the task (used to select the more suitable simulators to be used), like number of dimension supported (2D/3D), or the maximum number of agents.
The other important inputs for the SOO are the outputs of Modelling Tool: like the models, the swarm description and in case of optimization the fitness function to be used to optimize the algorithm. These inputs are taken by the SOO from the configuration directories of the Launcher.
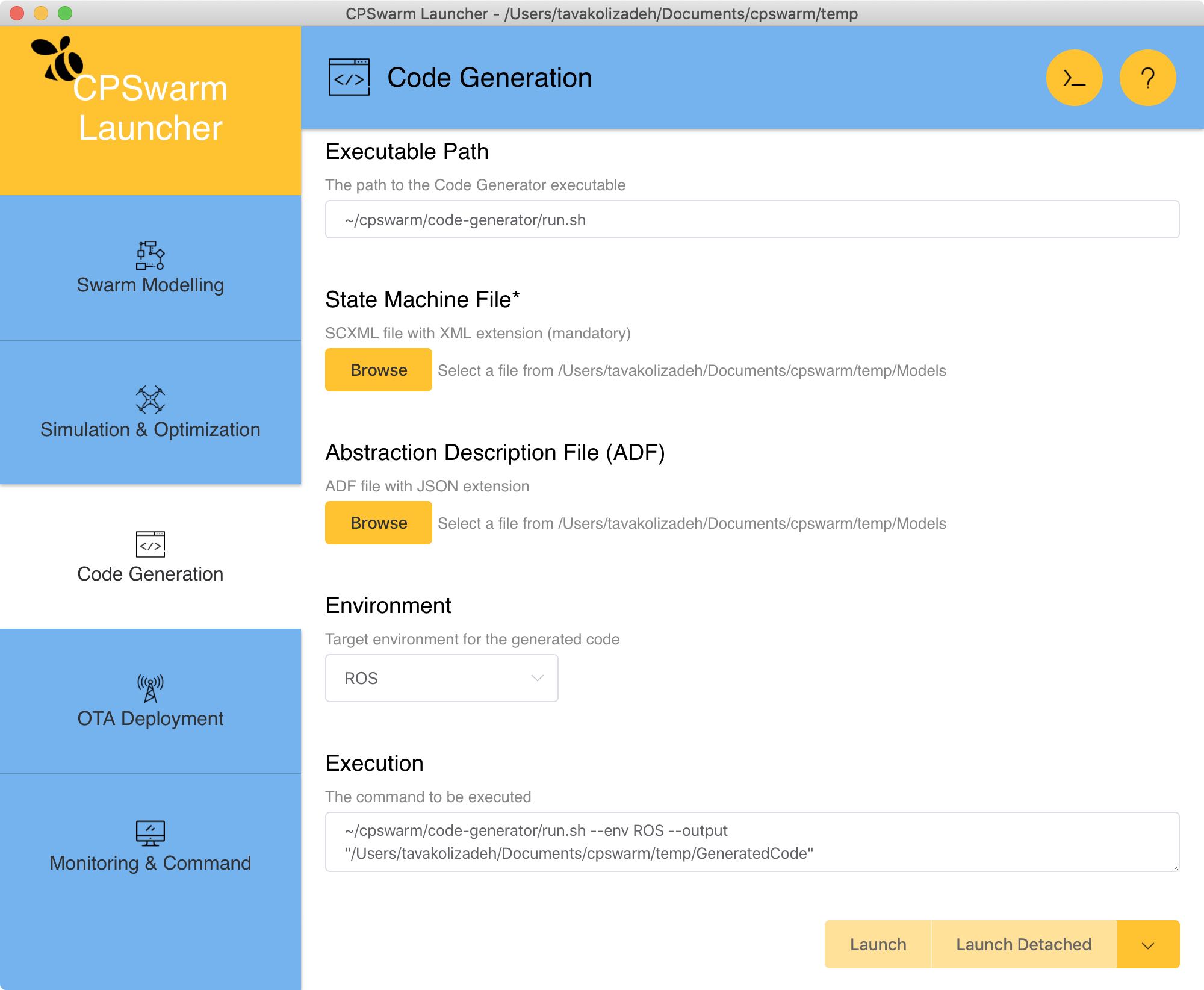
In order to run a code generation process, the user has to specify the following parameters in the launcher:
- The directory containing the inputs produced by the modeling phase.
- The directory where the outputs of the Code Generator should be collected.
- The target Runtime Environment. This parameter is optional and is set to “ROS” by default.
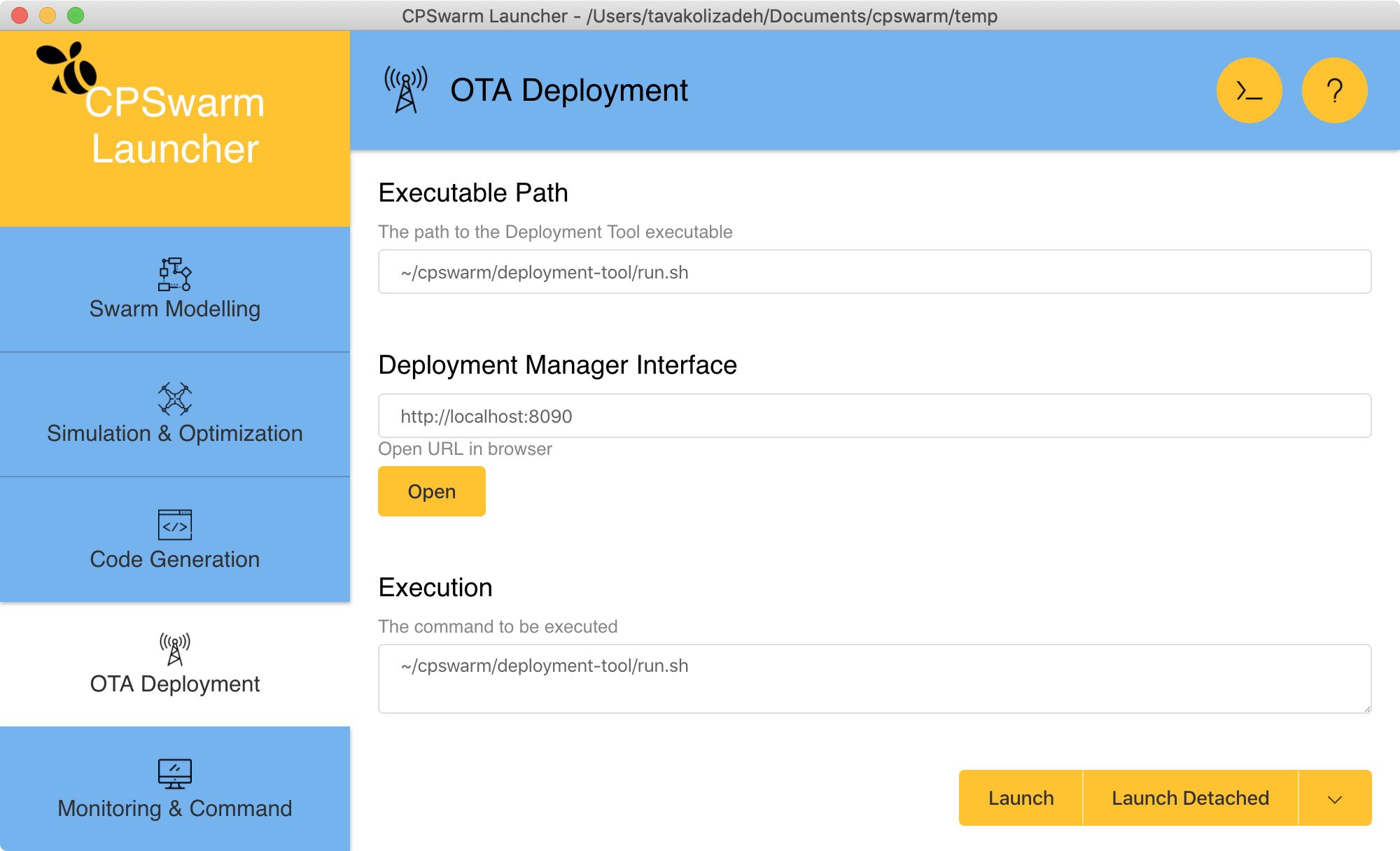
For the deployment phase, the launcher can help to start the deployment server and open its web interface:
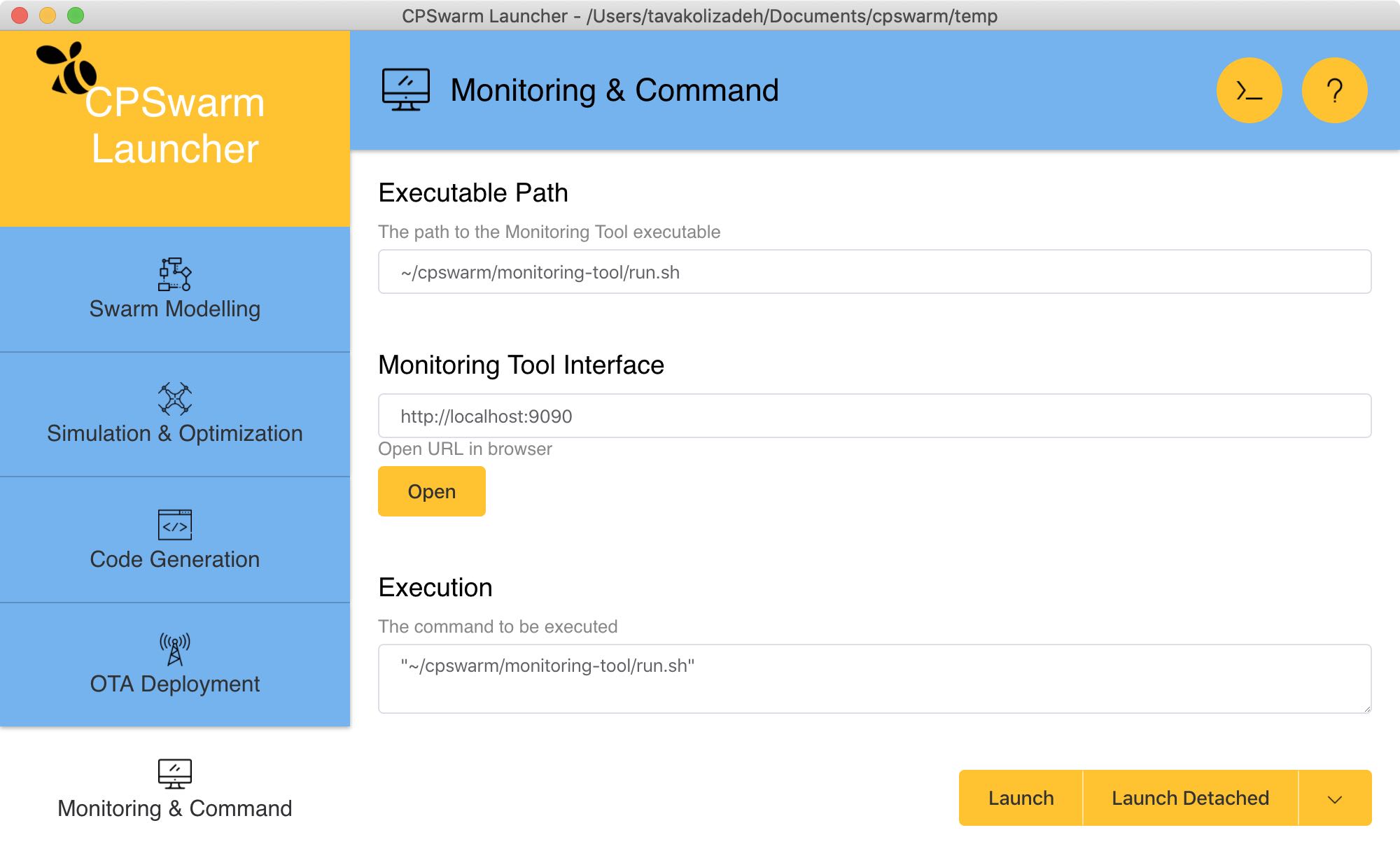
The user may use the launcher to start the Monitoring and Command Tool’s server and its web-based graphical user interface:
Further information: