This is a small 32bit (i686) kernel written using the Nim programming language.
I have been wanting to do this for a while but it wasn't until people in the #nim IRC channel inquired about Nim OS dev and the rustboot kernel inspired me that I finally did it.
It doesn't do much, but it doesn't need to. Its purpose is to provide a starting point for anyone wishing to write an OS in Nim.
It still manages to do a little more than fill a screen with a certain color. Nimkernel implements:
- A
writeStringfunction which shows a string on screen in a specified position. - A
rainbowfunction which shows a string with a rainbow-like text foreground color differentiation in a specified position. - Some simple error handling by implementing Nim system.nim's
panicfunction. - Support for 16 colors with a brilliant type safe API!
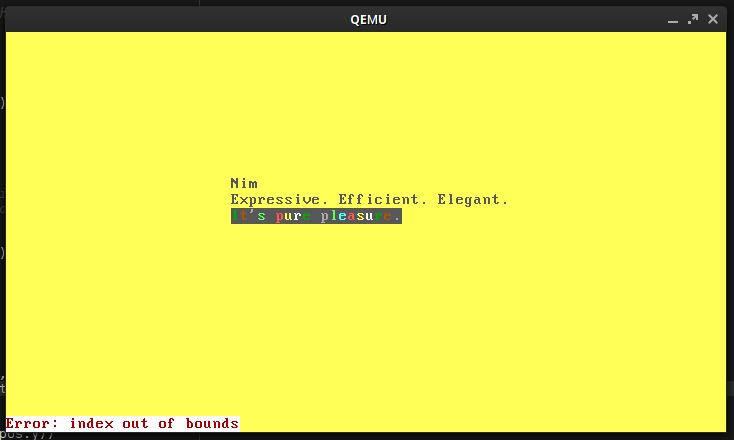
Note: The error at the bottom is intentional, it is used to show that the error handling works properly.
You are required to have:
- QEMU
- a C and asm cross-compiler for i686
- Nim 1.6.0 or higher
- nimble (*)
* You can always grab the nake library manually from here.
I have performed this setup on a Arch Linux machine, but all other distros should work too.
For more information take a look at the OSDev article.
You will need to download the source of binutils and gcc.
First cd into a suitable directory in which you would like to download, unzip
and build the cross compiler. Then perform the following actions:
$ wget https://ftp.gnu.org/gnu/binutils/binutils-2.37.tar.xz
$ tar -xJf binutils-2.37.tar.xz
$ cd binutils-2.37
$ mkdir build && cd build
$ ../configure --target=i686-elf --prefix=$HOME/cross-tools/ --with-sysroot --disable-nls --disable-werror
$ make -j$(nproc)
$ make installYou may then grab the GCC source and build it:
$ wget https://ftp.gnu.org/gnu/gcc/gcc-11.2.0/gcc-11.2.0.tar.xz
$ tar -xJf gcc-11.2.0.tar.xz
$ cd gcc-11.2.0
$ mkdir build && cd build
$ ../configure --target=i686-elf --prefix=$HOME/cross-tools/ --disable-nls --enable-languages=c --without-headers
$ make all-gcc -j$(nproc)
$ make all-target-libgcc -j$(nproc)
$ make install-gcc
$ make install-target-libgccYou should then have a i686-elf-gcc and i686-elf-as executable in $HOME/cross-tools/bin/ or somewhere thereabouts. You should then add it to your PATH permanently or temporarily by doing:
export PATH=$PATH:$HOME/cross-tools/binIf for some reason you either can't or don't want to build your own toolchain you can grab binaries from https://github.com/lordmilko/i686-elf-tools/releases
Please note that these are a bit outdated but they are confirmed to work.
Follow the instructions in the Nim repo to bootstrap Nim and put it in your PATH.
Do the same for nimble and install
nake by executing nimble install nake or
alternatively just save nake
into the root dir of this repo.
You can then compile the nakefile and therefore compile nimkernel:
$ nim c nakefile
$ ./nakefile runThis will automatically build and run the kernel using QEMU.
Nimkernel is licensed under the MIT license.