
![]()
![]()

![]()
Great that you've made it to this little Eclipse project! Let's get you started by providing a quick background tour, introducing the project scope and all you need for installation and a first running example.
So first off: What is iceoryx?
iceoryx is an inter-process-communication (IPC) middleware for various operating systems (currently we support Linux, MacOS and QNX). It has its origins in the automotive industry, where large amounts of data have to be transferred between different processes when it comes to driver assistance or automated driving systems. However, the efficient communication mechanisms can also be applied to a wider range of use cases, e.g. in the field of robotics or game development.
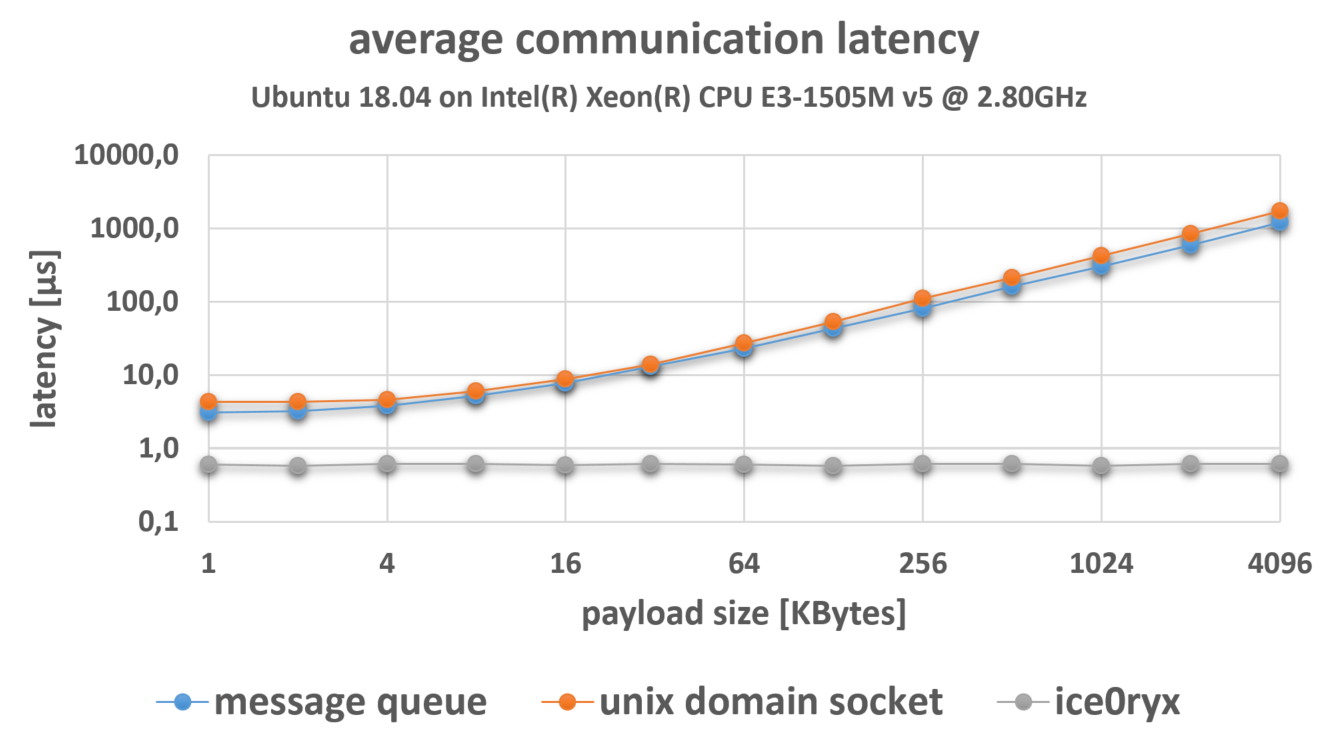
iceoryx uses a true zero-copy, shared memory approach that allows to transfer data from publishers to subscribers without a single copy. This ensures data transmissions with constant latency, regardless of the size of the payload. For more information have a look at the 1000 words iceoryx introduction
You're right, middleware is a cluttered term and can somehow be all or nothing, so let's talk about the goals and non-goals of iceoryx.
It's all about the API?!
Don't get too frightened of the API when strolling through the codebase. Think of the untyped C++ and the C API as a "plumbing" one ("plumbing" as defined in Git, which means low-level). We're not using the "plumbing" APIs ourselves, but instead the typed C++ API. The normal use case is that iceoryx is integrated as high-performance IPC transport layer in a bigger framework with additional API layers. An example for such a "porcelain" API would be ROS 2. Others are listed in the next section.
You can find the full API documentation on 🌐 https://iceoryx.io.
| Framework | Description |
|---|---|
| ROS 2 | Eclipse iceoryx can be used inside the Robot Operating System with rmw_iceoryx |
| eCAL | Open-source framework from Continental AG supporting pub/sub and various message protocols |
| RTA-VRTE | Adaptive AUTOSAR platform software framework for vehicle computer from ETAS GmbH |
| Cyclone DDS | Performant and robust open-source DDS implementation maintained by ADLINK Technology Inc. |
| Apex.OS | Safe and certified software framework for autonomous mobility systems from Apex.AI |
You can find the build and installation guidelines here.
After you've built all the necessary things, you can continue playing around with the examples.
If you want to avoid installing anything on your host machine but you have Docker installed, it is possible to use it to build and run iceoryx applications.
Please see the dedicated README.md for information on how to do this.
Quality level are 5 to 1+, where 1+ is highest level.
| CMake project/target | QNX | Linux, Windows, MacOS | Comment |
|---|---|---|---|
| iceoryx_hoofs | 1+ | 2 | |
| iceoryx_posh | 1+, 2 | 2 | Will be split into separate targets |
| iceoryx_binding_c | 2 | 2 | |
| iceoryx_examples | 5 | 5 | All example code in this folder |
| iceoryx_dds | 4 | 4 | |
| iceoryx_introspection | 5 | 5 | |
| iceoryx_meta | 5 | 5 |
Is something missing or you've got ideas for other nifty examples? Jump right away to the next section!
Please refer to the CONTRIBUTING.md for a quick read-up about what to consider if you want to contribute.
Get to know the upcoming features and the project scope in PLANNED_FEATURES.md.
| Name | Description | Technologies |
|---|---|---|
| Larry.Robotics | An iceoryx demonstrator for tinker, thinker and toddler | Demonstrator |
| iceoryx-rs | Experimental Rust wrapper for iceoryx | Rust |
| IceRay | An iceoryx introspection client written in Rust | Rust |
Please have a look at the GOVERNANCE.md.