Find the knee of a curve or the elbow of a curve.

kneebow builds upon a very simple idea: if we want to find the elbow of a curve, we can simply rotate the data so that curve looks down and then take the minimum value. If we want to find the knee of the curve, we take the maximum value instead. It's as simple as that.
For more info, see this answer on the Data Science StackExchange.
You can install the package via pip:
pip install kneebowAlternatively, you can also install the latest version from GitHub:
pip install git+https://github.com/georg-un/kneebow.gitLet's assume, we try to find the elbow of the following data:
import numpy as np
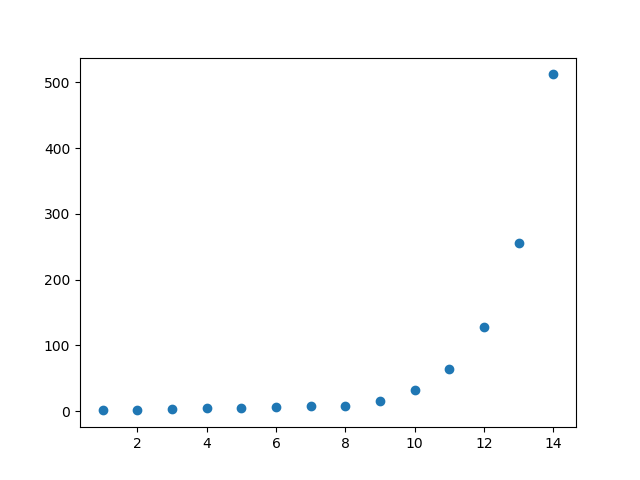
data = np.array([[1, 1], [2, 2], [3, 3], [4, 4], [5, 5], [6, 6], [7, 7], [8, 8], # linear until (8,8)
[9, 16], [10, 32], [11, 64], [12, 128], [13, 256], [14, 512]]) # exponential afterwardsLet's have a peak how this data looks like:
To find the elbow, we create an instance of the Rotor class and use its fit_rotate method:
from kneebow.rotor import Rotor
rotor = Rotor()
rotor.fit_rotate(data)Now we can get the index of the elbow as follows:
elbow_idx = rotor.get_elbow_index()
print(elbow_idx) # 11The Rotor class also comes with plot methods to inspect the data visually together with the estimated elbow/knee:
rotor.plot_elbow()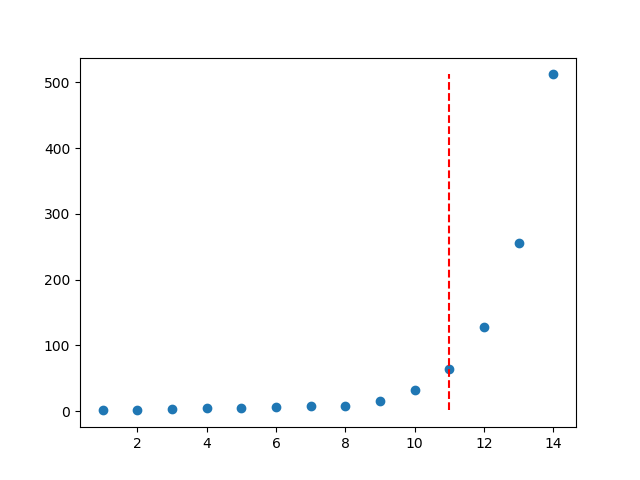
If you need to cite this package, you can do so as follows:
@misc{kneebow,
title={ {kneebow}: Knee or elbow detection for curves},
author={Georg Unterholzner},
year={2019},
howpublished={\url{https://github.com/georg-un/kneebow}},
}
Note: Make sure to import the url package with: \usepackage{url}.
Georg Unterholzner. (2019). kneebow: Knee or elbow detection for curves. https://github.com/georg-un/kneebow.
Distributed under the MIT License. See LICENSE for more information.