{kind=link}
Warning: This repo is no longer maintained!
Users have reported issues with modern versions of PyTorch. We advise that readers refer to vhe.py only as a way to understand the structure of the model.
This is a simple PyTorch implementation for training a Variational Homoencoder, as in the paper:
The Variational Homoencoder:
Learning to learn high capacity generative models from few examples
Watch the oral presentation here (UAI 2018)
This code is written to be generic, so it should apply easily to different domains and network architectures. It also extends easily to a variety of generative model structures, including the hierarchical and factorial latent variable models shown in the paper. The code covers the stochastic subsampling of data used during training (Algorithm 1), as well as the reweighting of KL terms in the training objective.
Feel free to email me at lbh@mit.edu with any questions
Variational Homoencoder for class-structured datasets
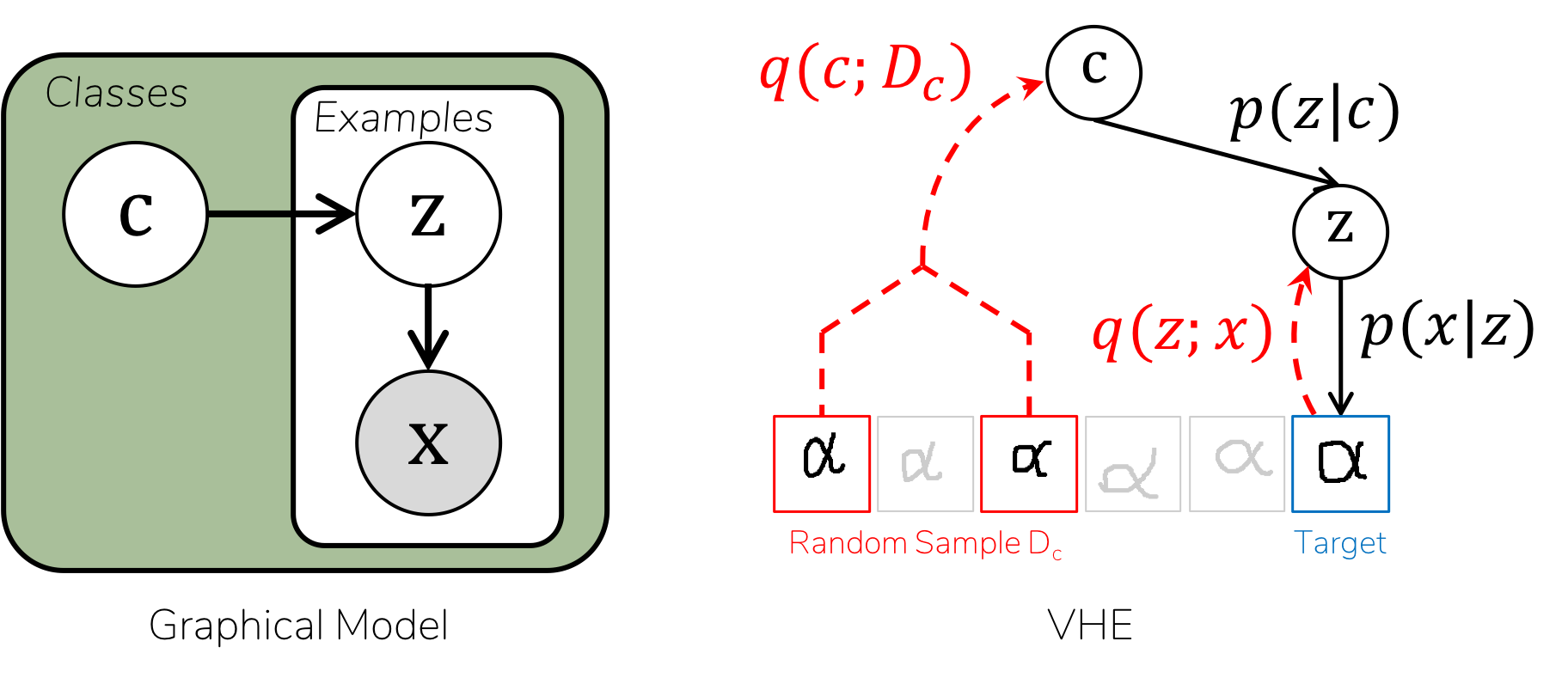
example_czx.py provides a toy example of a model where data are partitioned into classes.
- Each class will get its own latent variable
c, with a Gaussian prior - Each element will get its own latent variable
z, with a Gaussian prior - The likelihood
p(x|c,z)will be a Gaussian distribution, with parameters given by a linear neural network. - Encoders are
q(z|x)andq(c|D)are both linear
Define every distribution (encoders, decoders, prior) as an nn.Module which implements:
def forward(self, [inputs,] *args, <variable>=None)Arguments:
- First argument is
inputsfor an encoder (batch * |D| * ...) <variable>is the random variable to be scored/sampled by the distribution- args are latent variables on which
<variable>depends
Returns:
- A tuple:
(value, log_prob) - If
<variable>isNone: samplevalue - Otherwise:
value = <variable>
import torch
from vhe import VHE, DataLoader
class Px(nn.Module): # p(x|c,z)
def __init__(self):
super().__init__()
... #Define any params
def forward(self, c, z, x=None):
mu, sigma = ...
dist = torch.distributions.normal.Normal(mu, sigma)
if x is None: x = dist.rsample() # Sample x if not given
log_prob = dist.log_prob(x).sum(dim=1) # Should be a 1D vector with nBatch elements
return x, log_prob
class Qc(nn.Module): # q(c|D)
def __init__(self): ...
def forward(self, inputs, c=None):
# inputs is a (batch * |D| * ...) size tensor, containing the support set D
...
return c, log_prob
class Qz(nn.Module): # q(z|x,c)
def __init__(self): ...
def forward(self, inputs, c, z=None):
# inputs is a (batch * 1 * ...) size tensor, containing the input example x
...
return z, log_probCreate a VHE module from the encoder and decoder modules. All variables use an isotroptic Gaussian prior by default, but may also be specified.
model = VHE(encoder=[Qc(), Qz()], decoder=Px()) #Use default prior c,z ~ N(0, 1)
# or: model = VHE(encoder=[Qc(), Qz()], decoder=Px(), prior=...)Create a DataLoader to sample data for training.
data_loader = DataLoader(data=data,
labels={"c":class_labels, # The class label for each element in data
"z":range(len(data))}, # A unique label for each element in data
k_shot={"c":5, "z":1}, # Number of elements given to each encoder
batch_size=batch_size)Train using the variational lower bound model.score(...)
optimiser = optim.Adam(vhe.parameters(), lr=1e-3)
for epoch in range(...):
for batch in data_loader:
optimiser.zero_grad()
log_prob = model.score(inputs=batch.inputs, sizes=batch.sizes, x=batch.target)
(-log_prob).backward() # Negative to get loss
optimiser.step()