FRobs_RL is a flexible robotics reinforcement learning (RL) library. It is primarly designed to be used in robotics applications using the ROS framework. It is written in Python and uses libraries based on the PyTorch framework to handle the machine learning. The library uses Gymnasium to create and handle the RL environments, stable-baselines3 to provide state-of-the-art RL algorithms, Gazebo to simulate the physical environments, and XTerm to display and launch many of the ROS nodes and processes in a lightweight terminal.
FRobs_RL has the following goals:
- Provide a framework to easily train and deploy RL algorithms in robotics applications using the ROS middleware.
- Provide a framework to easily create RL enviroments for any type of task.
- Provide a framework to easily use, test or create state-of-the-art RL algorithms in robotics applications.
Documentation is available at: frobs-rl.readthedocs.io
FRobs_RL has been tested in ROS Noetic, although it should work in previous versions of ROS like Melodic or Kinetic with minimal changes. Although it is recommended that the user has previous knowledge of the ROS ecosystem, and has a working ROS distribution environment, in the following instructions an example of the installation of ROS will be provided, especially for the Noetic distribution.
To install ROS Noetic, the user can go to the official website ROS Melodic installation and follow the instructions. Below are the suggested commands to install ROS Noetic on a Ubuntu 20.04 Focal machine.
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt install curl
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
sudo apt update
sudo apt install ros-noetic-desktop-full
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
sudo apt install python3-rosdep
sudo rosdep init
rosdep updateWe recommend catkin-tools to build your ROS workspace:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu `lsb_release -sc` main" > /etc/apt/sources.list.d/ros-latest.list'
wget http://packages.ros.org/ros.key -O - | sudo apt-key add -
sudo apt-get update
sudo apt-get install python3-catkin-toolsAs XTerm is widely used in the library to execute some processes in a lightweith terminal, if the user does not already has XTerm it can be installed with the command:
sudo apt install xtermThe library requieres Moveit! to run, to install it just run:
sudo apt install ros-noetic-moveitTo use the library it is necessary to download and compile the library package. To create a new ROS workspace called rl_ws and compile the frobs_rl package, one can use the following commands:
cd ~
mkdir -p rl_ws/src
cd rl_ws
git clone https://github.com/jmfajardod/frobs_rl src/frobs_rl -b main
rosdep install -y --from-paths src --ignore-src --rosdistro ${ROS_DISTRO}
catkin config --extend /opt/ros/${ROS_DISTRO}
catkin build
source devel/setup.bashAs the library is based in the Gymnasium and stable-baselines3 libraries, one must install these libraries along with PyTorch and TensorBoard. To go to the frobs_rl package and install these dependencies execute the following commands.
Note that the following commands will try to install a PyTorch version without GPU support, as it is written in the dependencies of stable-baselines3, if your computer supports GPUs, you can install the GPU version of PyTorch by following the instructions on the PyTorch website.
roscd frobs_rl # Only works the setup.bash has been sourced
sudo apt install pip
python3 -m pip install -r requirements.txtTo try the library using some example environments, the user needs to download the resources package in the workspace src folder and compile it. The followings command can be used to do that:
cd ~
cd rl_ws/src
git clone https://github.com/jmfajardod/frobs_rl_resources -b main
cd ..
rosdep install -y --from-paths src --ignore-src --rosdistro ${ROS_DISTRO}
catkin build
source devel/setup.bashNext to test the library, the user can use the following command to begin the training of a new agent for a reacher environment with a ABB IRB 120 robot:
rosrun abb_irb120_reacher train.pyOr the following command to begin the training of a new agent for a mobile robot environment with a Kobuki robot:
rosrun kobuki_maze_rl train.pyFor both examples, the user can use use TensoBoard to visualize the training process. To do that go to the logs folder of either the abb_irb120_reacher or kobuki_maze_rl package and execute the following command:
tensorboard serve --logdir_spec=td3_logs:./td3/TD3_New/This will open a web browser in the localhost:6006 port, where the user can see the training process logs located in the TD3_New folder, as configured in the train.py and td3.yaml files.
If some error occurs when launching the ROS Nodes, make sure that the train.py are executables using the ll and chmod a+x train.py commands.
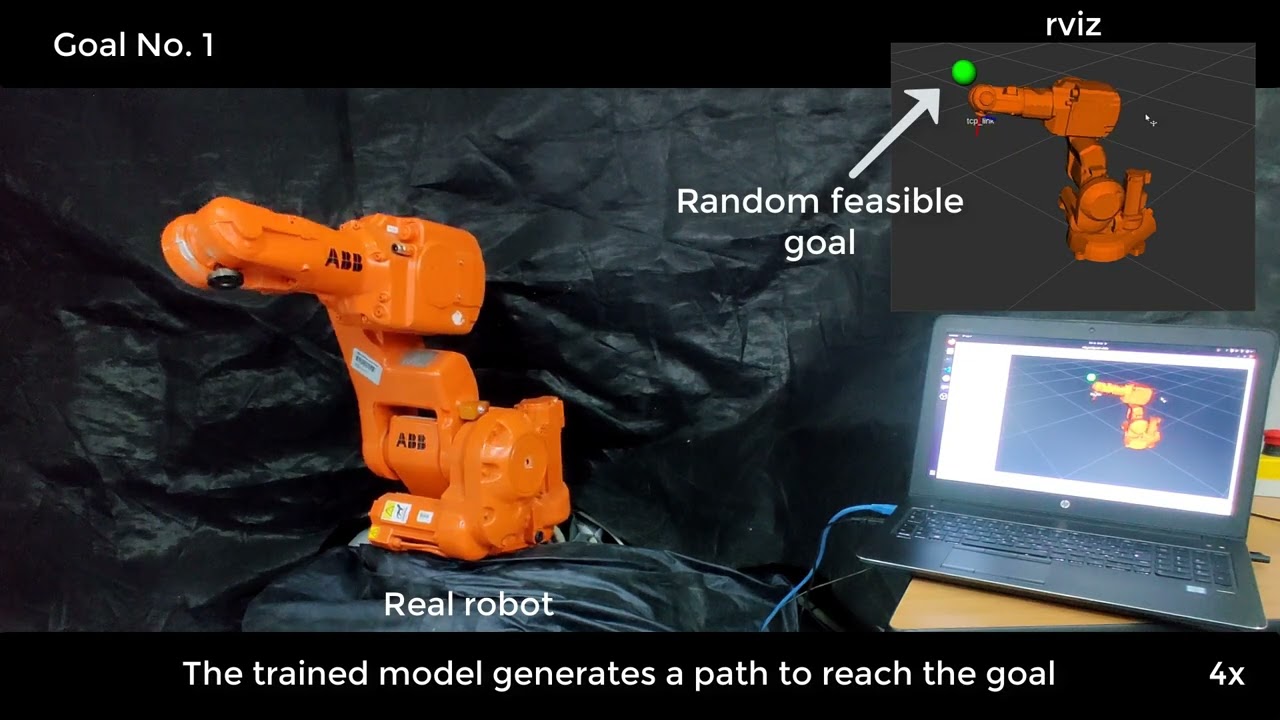
In the following video all FRobs_RL capabilies are shown. Training in virtual environments, Gazebo simulations, ROS integration and Deployment on real hardware.