{kind=link}
Forked from this repo to add some features and general experimentation. See the (outdated) project website for more explanation.
Current enhancements in this fork:
- Runtime-selection of an input module (OpenCV or Firewire) instead of compilation flag (see #1 )
- Runtime-configuration of the detector (greyscale or RGB) instead of compilation flag (see #1 )
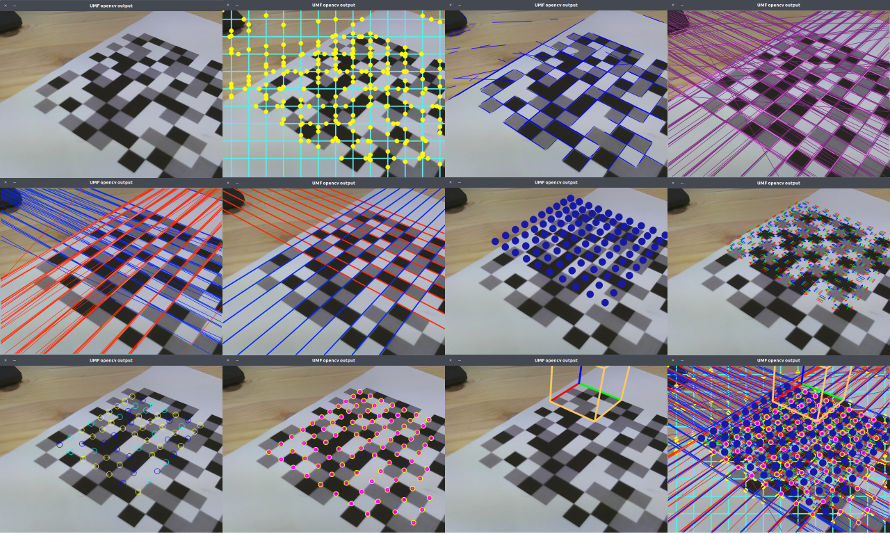
- Runtime-selection of graphical debug output (see #2 )
- Better graphical debug output (see #2 )
Planned enhancements:
- Allow runtime-selection of detector flags in a similar way as I added it for graphical debug output
- Display the current detector flags
- Fix missing parts for proper RGB detection
- Code cleanup
- Make better use of vector and matrix classes in OpenCV and Eigen3
- General update to C++11
In case you end up using our source code in research, please add a reference to one of our relevant publications:
I. Szentandrasi, M. Zacharias, J. Havel, A. Herout, M. Dubska, and R. Kajan. Uniform Marker Fields: Camera localization by orientable De Bruijn tori. In ISMAR 2012, 2012
Adam Herout, Istvan Szentandrasi, Michal Zacharias, Marketa Dubska, and Rudolf Kajan. Five shades of grey for fast and reliable camera pose estimation. In Proceedings of CVPR, pages 1384–1390. IEEE Computer Society, 2013
I. Szentandrasi, M. Dubska, M. Zacharias, and A. Herout. Poor man’s virtual camera: Real-time simultaneous matting and camera pose estimation. IEEE Computer Graphics and Applications, 2016
Dependencies
- argtable2
- opencv [optional | recommended]
- libdc1394-2 [optional] - firewire support
- Halide [optional] - optimized code
Included
- Eigen3
- glm
$ touch .depend
$ make depend
$ make allTo generate halide
$ cd ext/halide
$ export HALIDE_PATH=/your/path/to/halide
$ make allThis generates an object archive for linux (you should add the USE_NATIVE in defines.h, and add the ext/lib/native_x.a to Makefile) and assembly files for android build.
Dependencies
- Visual Studio 2013
- opencv
- Halide
- argtable2
- environment variables (see vsproj/README.txt)
Open solution: vsproj/UMF/UMF.sln This should generate the native libraries with Halide and a .dll
- UMF generator server
- UMF generator client (original / my fork )
- UMF unity plugin