{kind=link}
The RobotEvt dataset contains sequences under different motion models, speeds and brightness from a static scene, specifically
- 4 motion models: PureRot - pure rotation; ParRot partial rotation; PureTranslate - pure translation and FullMod - full rigid motion model.
- 3 speeds: Fast - maximum speed of the robot arm (1m/s); Mid - 75% of the maximum speed and Slow - 50% of the maximum speed.
- 2 brightness conditions: On and Off means bright and dark conditions, respectively.
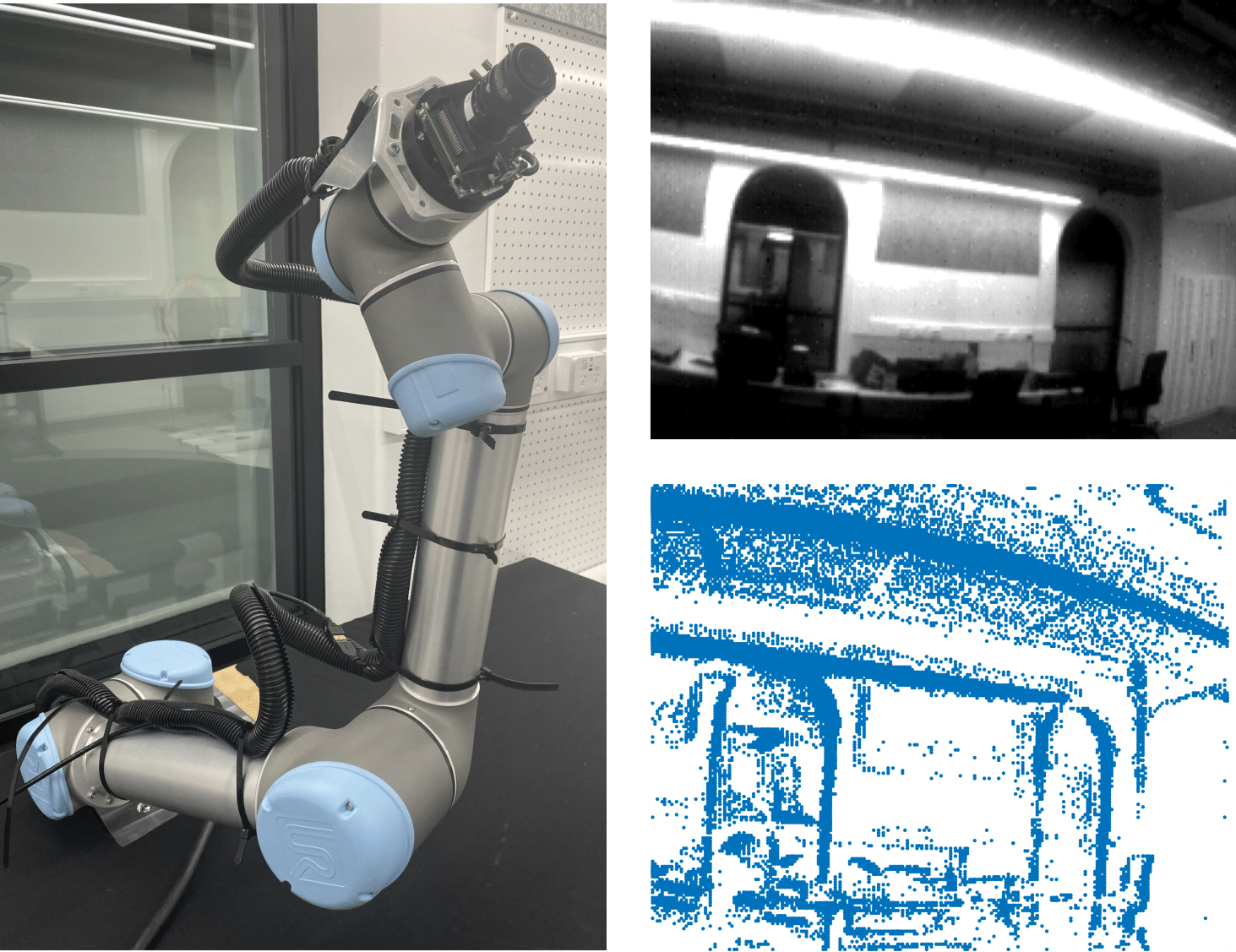
This dataset were recored with a DAVIS240C, attatched on the endpoint of a UR5 robot arm. Ground truth were generated from the UR5 robot arm.
Events, raw images and IMU measurements are stored in the rosbag file.
- dvs/events: event information (timestamp x y polarity).
- dvs/images: raw images at fix rate.
- dvs/imu: IMU measurement at fix rate.
Ground truth are provided with a txt file, where the poses are represented using rotation matrix and translation. One pose per line (timestamp r11 r12 r13 r21 r22 r23 r31 r32 r33 t1 t2 t3) .
calibration of camera is provided with a txt file (calib.txt), where the first four digits represent the camera intrinic (fx fy cx cy) and the rest digits represent the distortion model.
Download link for Pure Rotation sequences can be downloaded here, which contains the measurement of events, raw images and IMU. More sequences with full rigid motion and higher resolution generated using Prophesee cameras will be released soon.
Please cite the following paper when using this datase for academic usage.
Daqi Liu, Álvaro Parra, Tat-Jun Chin. Spatiotemporal registration for event-based visual odometry. Conference on Computer Vision and Pattern Recognition (CVPR) 2021