You signed in with another tab or window. Reload to refresh your session.You signed out in another tab or window. Reload to refresh your session.You switched accounts on another tab or window. Reload to refresh your session.Dismiss alert
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
You can easily see the impact of enabling TCP_NODELAY with rostopic delay --tcpnodelay <topic>, which can be compared against rostopic delay <topic>, e.g.:
With this I can easily plot the delay and see the impact of TCP_NODELAY:
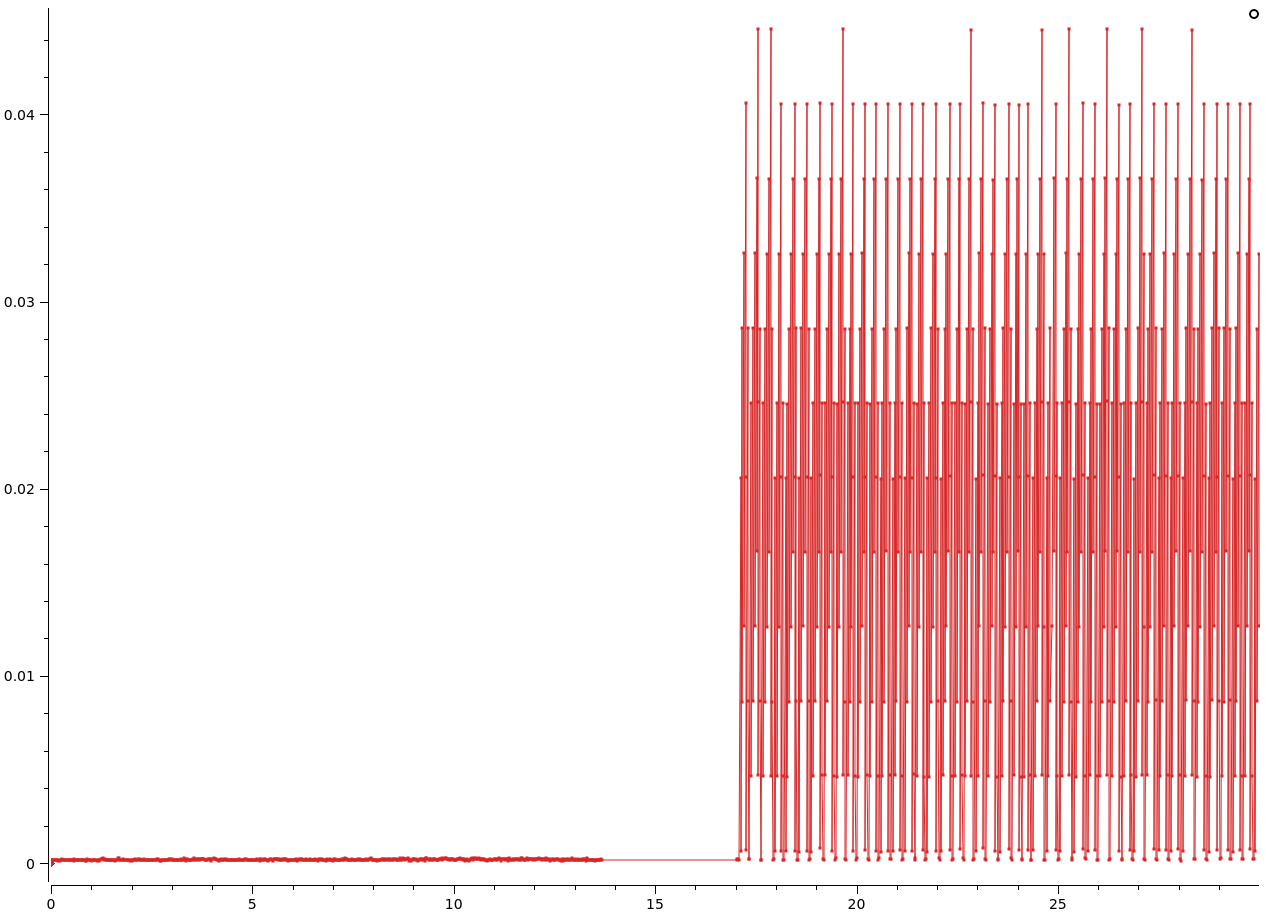
tcp_no_delay: false (default):
tcp_no_delay: true:
The next plot shows the delay for tcp_no_delay: true and tcp_no_delay: false one after the other, so it's easier to see the impact, with the same axes scale:
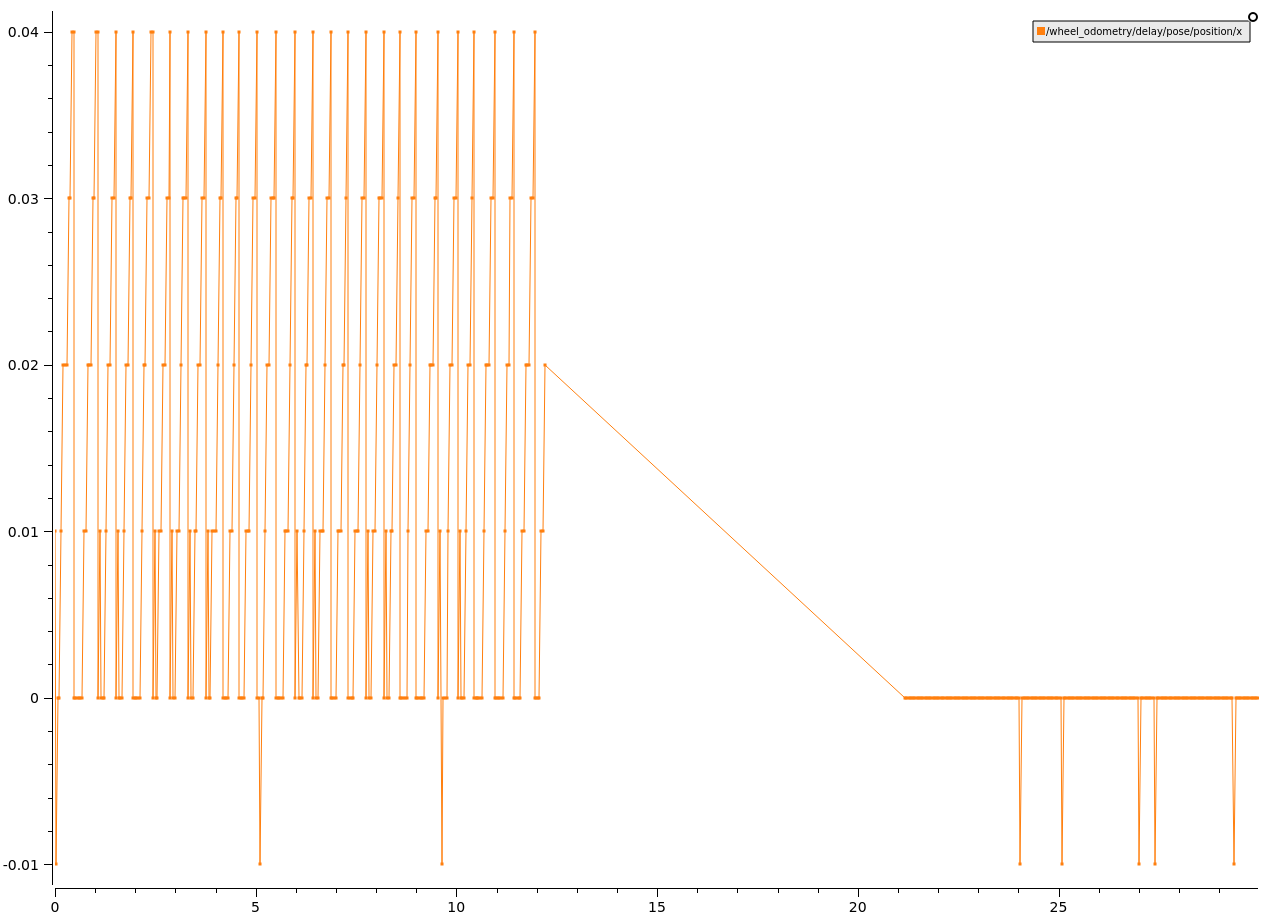
We could do the same in simulation, but in that case the delay is computed using the simulated time, not the wall time, so there are some discretization artifacts, e.g. with simulation running at 100Hz:
This also allows to see that for nav_msgs::Odometry messages, Nagle's algorithm buffers approximately 11-12 messages.
A big part of the merit should go to @ayrton04 , who already exposed this option in robot_localization. 😃
I just took the time to confirm it's actually reducing the delay for the small messages the sensor models subscribe to.
BTW, I also tried evaluating things on bagged data, but that didn't shouw any difference. Part of the reason is that rosbag record doesn't use TCP_NODELAY when recording 😉 , and I believe rosbag play provides a simulated clock that somehow interfered with my comparison. Just saying, in case you want to confirm my results yourself.
I ran my tests on a beefy desktop computer, so I expect your results to be the same or worse. And I guess they'd be similar if you run things live on a robot running ROS, likely with hundreds of topics / sockets. TBH I don't know if that matters, but I think it's worth trying and documenting it.
Add this suggestion to a batch that can be applied as a single commit.This suggestion is invalid because no changes were made to the code.Suggestions cannot be applied while the pull request is closed.Suggestions cannot be applied while viewing a subset of changes.Only one suggestion per line can be applied in a batch.Add this suggestion to a batch that can be applied as a single commit.Applying suggestions on deleted lines is not supported.You must change the existing code in this line in order to create a valid suggestion.Outdated suggestions cannot be applied.This suggestion has been applied or marked resolved.Suggestions cannot be applied from pending reviews.Suggestions cannot be applied on multi-line comments.Suggestions cannot be applied while the pull request is queued to merge.Suggestion cannot be applied right now. Please check back later.
This adds the
tcp_no_delayROS parameter to all sensor models. This parameter is equivalent to the~[sensor]_nodelayparameter in https://github.com/cra-ros-pkg/robot_localization/blob/melodic-devel/doc/state_estimation_nodes.rst#sensor_nodelay.You can easily see the impact of enabling
TCP_NODELAYwithrostopic delay --tcpnodelay <topic>, which can be compared againstrostopic delay <topic>, e.g.:I've used this simple Python node to generate dummy messages:
I've also computed the delay in the
fuse_models::Odometry2D::processmethod, with this changes wrt this PR:With this I can easily plot the delay and see the impact of
TCP_NODELAY:tcp_no_delay: false(default):tcp_no_delay: true:The next plot shows the delay for
tcp_no_delay: trueandtcp_no_delay: falseone after the other, so it's easier to see the impact, with the same axes scale:We could do the same in simulation, but in that case the delay is computed using the simulated time, not the wall time, so there are some discretization artifacts, e.g. with simulation running at 100Hz:
This also allows to see that for
nav_msgs::Odometrymessages, Nagle's algorithm buffers approximately 11-12 messages.More information on
TCP_NODELAYand other related topics can be found in:https://www.extrahop.com/company/blog/2016/tcp-nodelay-nagle-quickack-best-practices/