Home
This repository is a stack of sample codes for Gazebo and/or ROS , sample models and worlds for Gazebo.
I will organize samples separately as a ROS package except gazebo models, you can find location of a sample by using "roscd <Package Name>".
Package name of a sample, you can find it in the below table.
The table including one screen shot by each sample, it will help you to understand samples.
This wiki page will be updated at adding a new sample.
| Package | Screen Shot | Update Date | Description | G* | R* |
|---|---|---|---|---|---|
| rubbles | 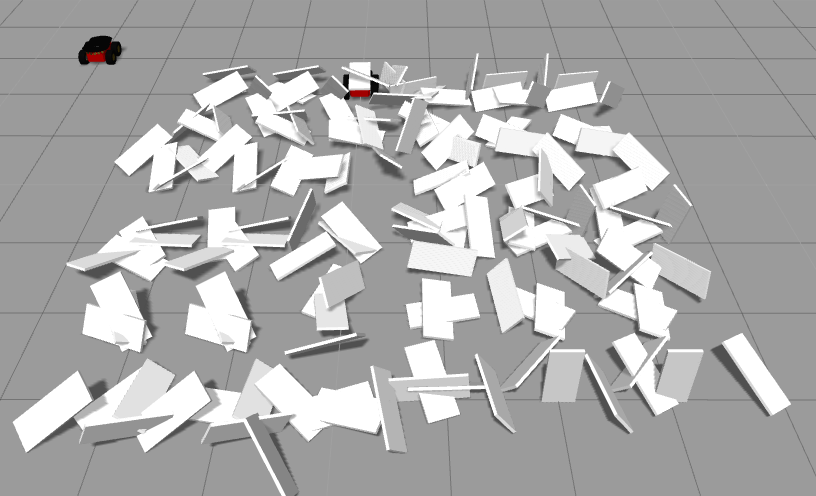 |
27 Sep.2017 | Rubbles in random geometry | Yes | No |
| spring |  |
18 Oct.2017 | A functionable spring model | Yes | No |
| fourlegs | 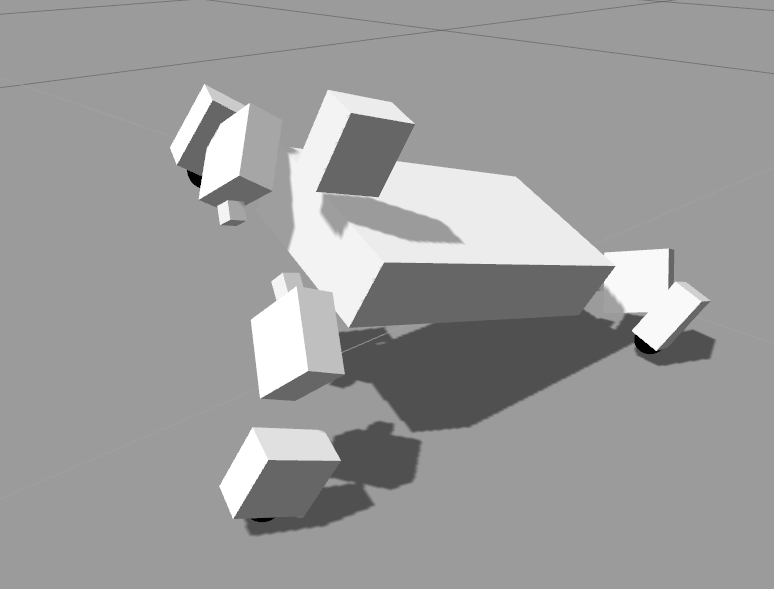 |
29 Oct.2017 | A walking quadruped robot model | Yes | No |
| fourlegs_wheeled | 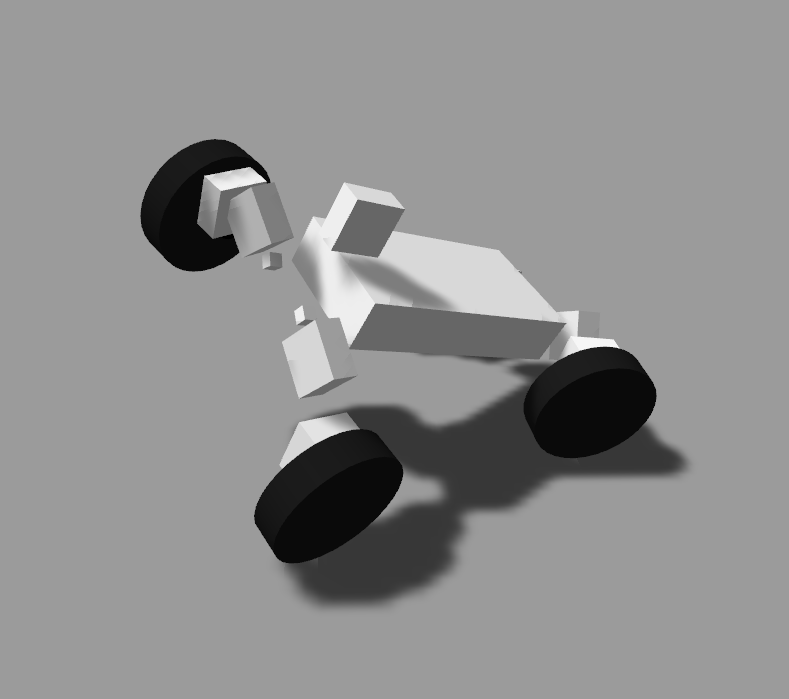 |
9 Sep.2021 | A walking quadruped robot model with wheels | Yes | No |
| crawler_robot | 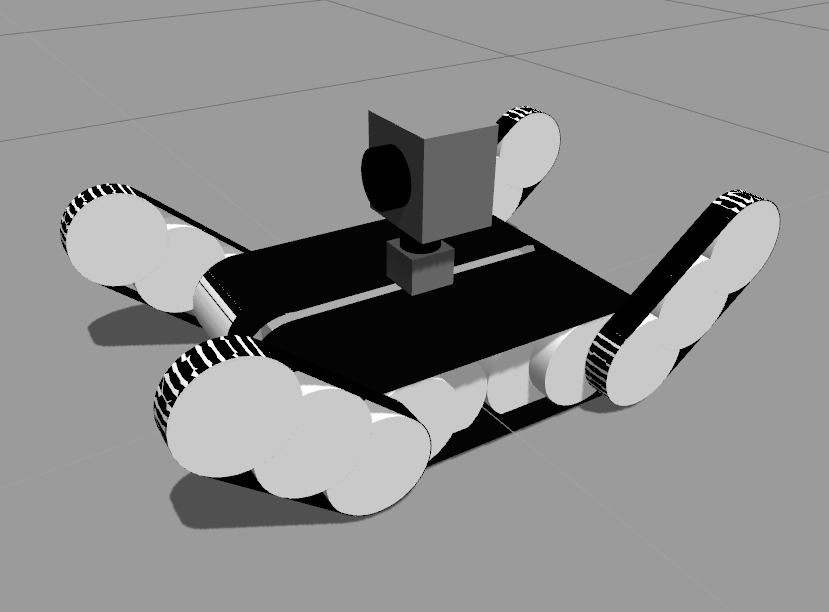 |
15 Nov.2017 | A crawler robot model with a controller software | Yes | No |
| crawler_robot_ros | |
16 Mar.2018 | A crawler robot model with a ROS controller software | Yes | Yes |
| twolinkarm | 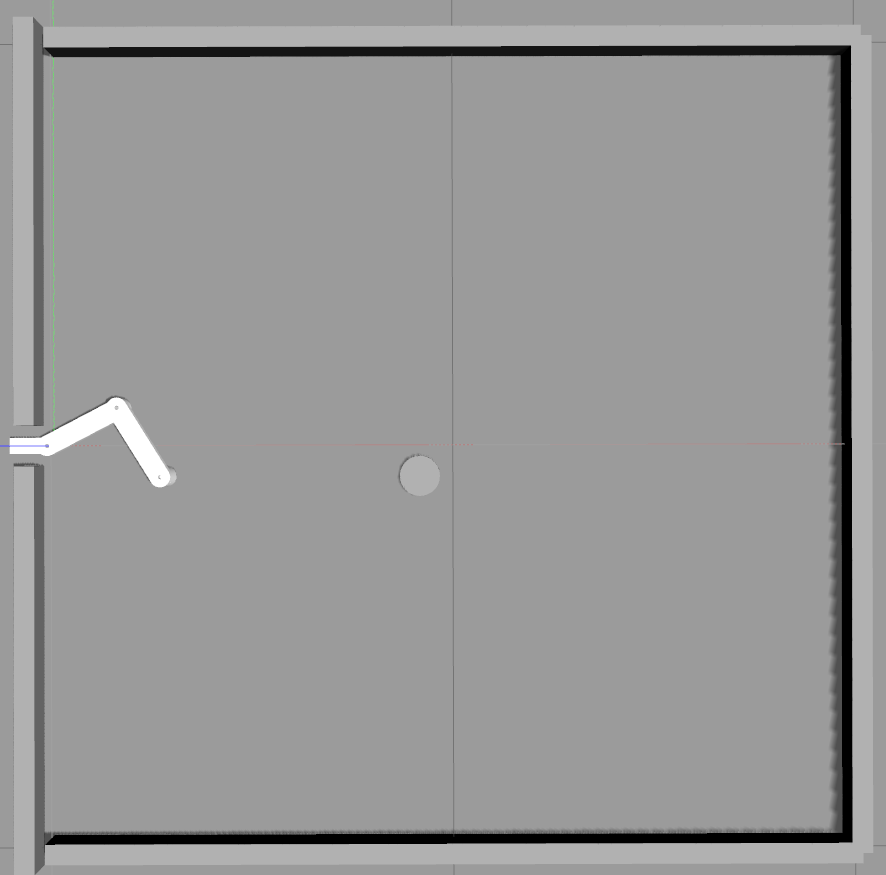 |
2 Feb.2018 | A two link arm robot model | Yes | No |
| centaur | 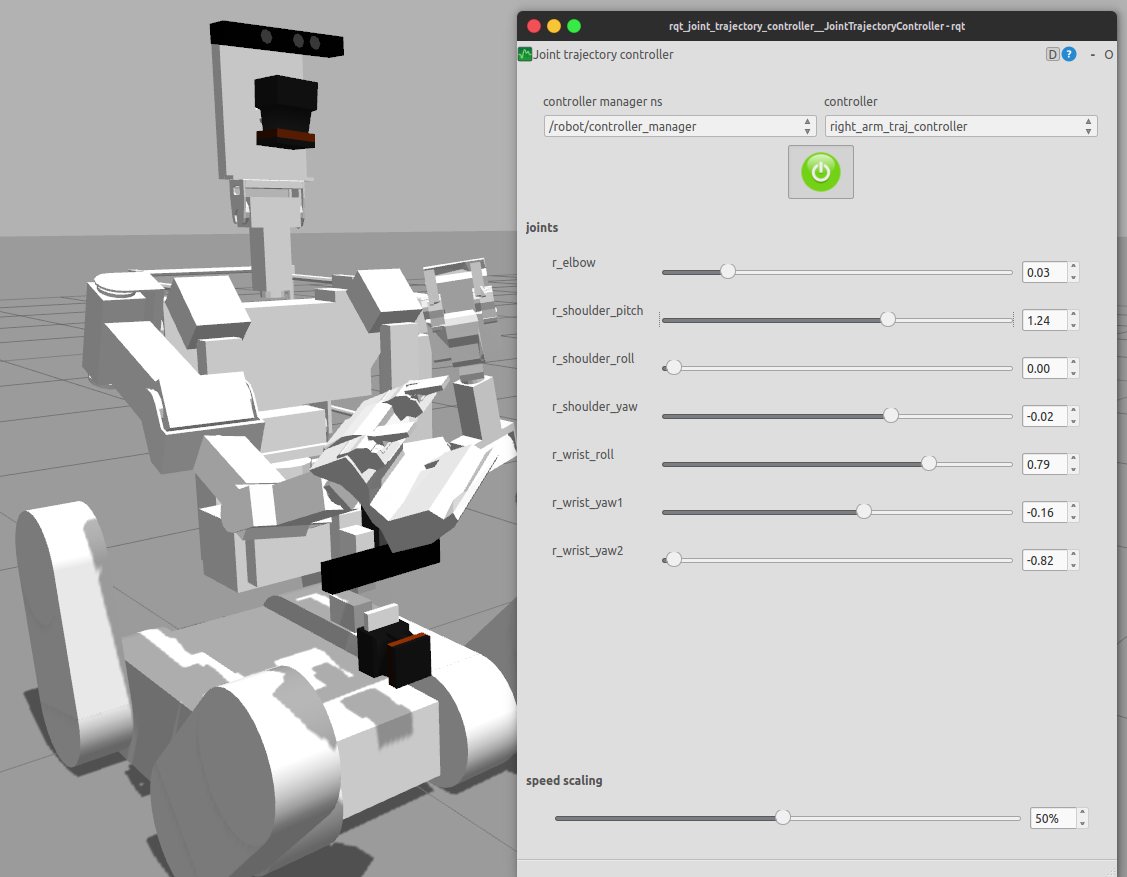 |
28 Feb.2018 | A centaur robot model | Yes | Yes |
| quadrotor | 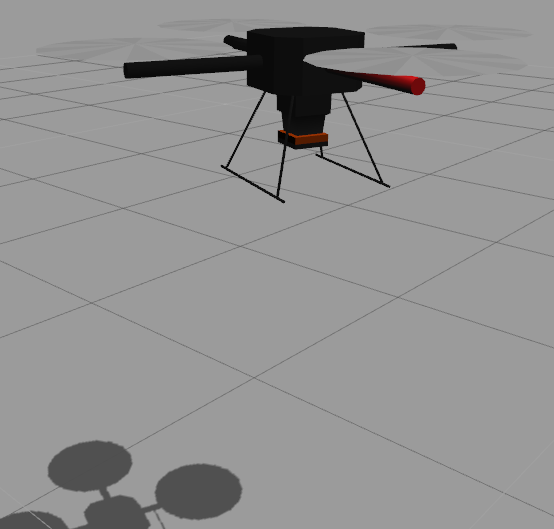 |
28 Feb.2018 | A quadrotor robot model | Yes | Yes |
G*)A package has some codes for Gazebo.
R*)A package has some codes for ROS(Almost packages have some launch files for just starting themselves. If a package has no code as ROS node, this column will be filled with "NO").
Repository Mind : "No Effort , No Gain"