{kind=link}
By Peiyun Hu, David Held, and Deva Ramanan at Carnegie Mellon University.
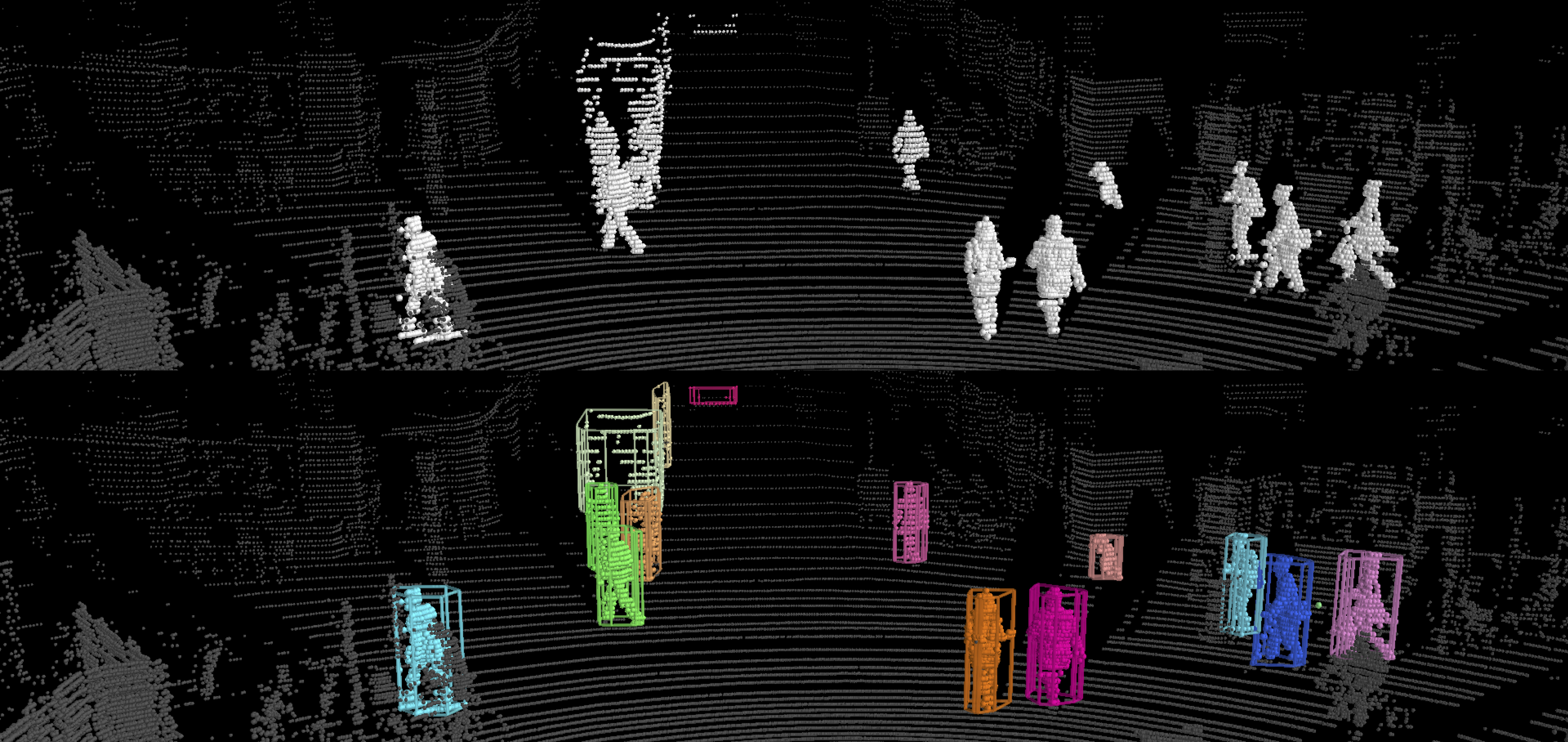
For segmenting LiDAR point clouds, if we score a segmentation by the worst objectness score among its individual segments, there is an algorithm that efficiently finds the optimal worst-case segmentation among an exponentially large number of candidate segmentations. The proposed algorithm takes a pre-processed LIDAR point cloud (top - with background removed) and produces a class-agnostic instance-level segmentation over all foreground points (bottom). We use a different color for each segment and plot an extruded polygon to show the spatial extent.
You can read our paper (open-access) here: https://ieeexplore.ieee.org/abstract/document/8954778.
In this repo, we provide our implementation of this work.
If you find our work useful in your research, please consider citing:
@article{hu2020learning,
title={Learning to Optimally Segment Point Clouds},
author={Hu, Peiyun and Held, David and Ramanan, Deva},
journal={IEEE Robotics and Automation Letters},
year={2020},
publisher={IEEE}
}Currently, code release is a work in progress. Below are what I plan to work on next:
- Update README to describe
- How to train the objectness model (PointNets) (
pointnet2/) - How to run segmentation (
segment_with_pointnet.py) - How to evaluate under-segmentation and over-segmentation (
evaluate_under_over*.py) - How to evaluate instance-segmentation (
evaluate_instance_all.py) - How to evaluate existing detectors (
evaluate_instance_all.py)
- How to train the objectness model (PointNets) (
- Merge
evaluate_under_over.pyandevaluate_under_over_ovlp_part_ignored.py- When evaluating under-segmentation and over-segmentation, we either
- Ignore objects with overlapping bounding boxes
- Or ignore points that fall into the overlapping regions
- Right now, they are highly redundant. I plan to merge them together.
- When evaluating under-segmentation and over-segmentation, we either
- Release all pre-trained models.
- Test training code.