{kind=link}
Written for Kapernikov cvba during my internship.
The brain of the Tello drone.
srv_tello_cmd = create_client<tello_msgs::srv::TelloAction>("/solo/tello_action");
srv_tello_cmd is used to send commands to the tello driver.
sub_key_input = create_subscription<std_msgs::msg::Char> ("/raw_keyboard", ..., ...);
sub_tello_response = create_subscription<tello_msgs::msg::TelloResponse> ("/solo/tello_response", ..., ...);
sub_demo_position = create_subscription<geometry_msgs::msg::Point> ("/solo/demo_position", ..., ...);
sub_key_input is used as input, see state machine below. sub_tello_response is used to receive feedback from tello driver. sub_demo_position is used to updated the point where the drone needs to go to.
pub_tello_twist = create_publisher<geometry_msgs::msg::Twist>("/solo/cmd_vel", ...);
pub_tello_twist publisches twist comands to the tello driver to move the drone.
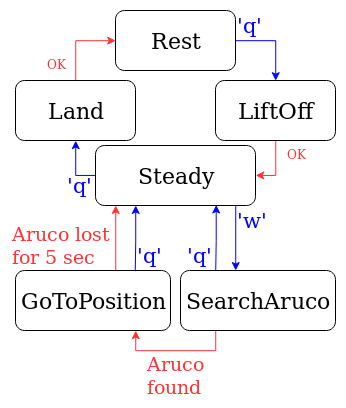
Image below is the state machine. Press 'q' to either liftoff, land or abort search, and 'w' to search for the Aruco marker. Blue arrows represent a transition duo to input from sub_key_input and red arrows represent a transition done by the controller itself.
Use the following command in the terminal to move the drone to a custom position:
ros2 topic pub /solo/demo_position geometry_msgs/Point "{x: 1.2, y: 0.5, z: 2.5}"