Controleaza un motor fara perii cu un Arduino si un ESC
Necesare:
- un motor fara perii;
- un ESC¹;
- un Arduino² (am folosit Nano);
- un potentiometru;
- niste baterii LiPo (am folosit de tip 18650);
Optionale, dar recomandate:
- un breadboard;
- o rama/suport pentru baterii si motor;
- un multimetru;
Potentiometrul, motorul, ESC-ul si bateriile luate de la TME:
| Simbol | Denumire producator | Producator |
|---|---|---|
| DF-DFR0054 | DFR0054 | DFROBOT |
| RS1408-3600KV | EMX-2309 3600KV | EMAX |
| ESC-BLHELI-12A | EMX-SC-0098 | EMAX |
| ACCU-INR18650-25R | INR 18650-25R | SAMSUNG SDI |
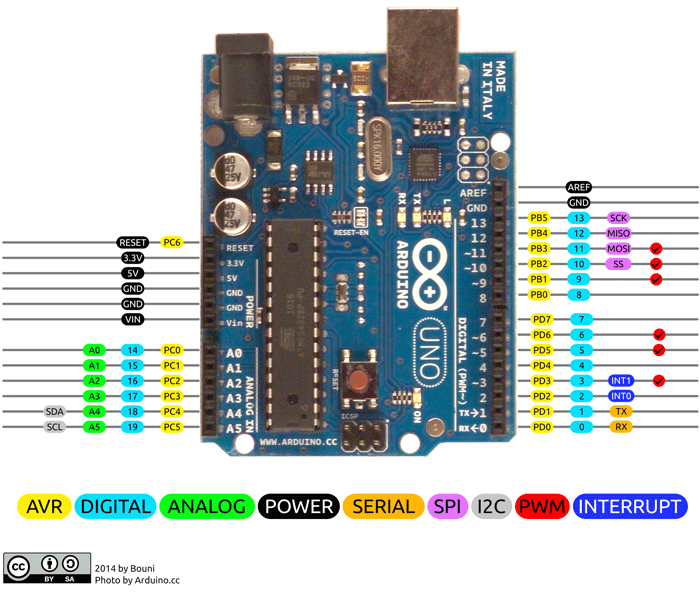
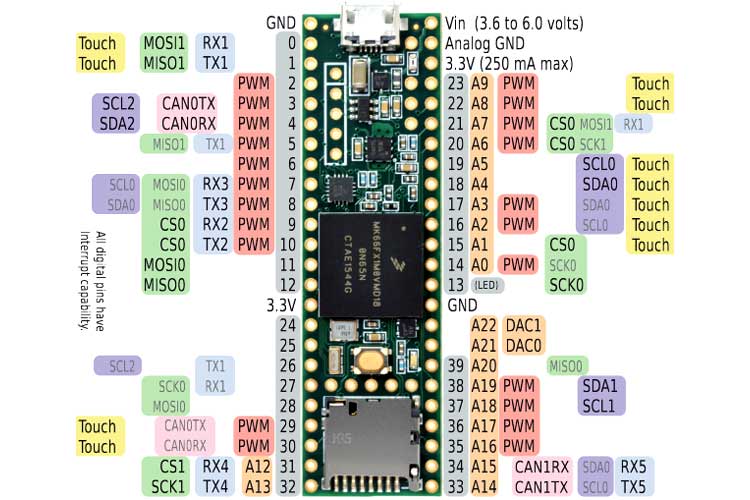
Pentru potentiometru este necesar un port PWM. Un port PWM este localizat diferit de la Arduino la Arduino. Ele sunt insemnate cu o linie in forma de unda sau pur si simplu scrie PWM. Exemple: Arduino Nano, Arduino Uno, Arduino Pro Micro, Teensy 3.6.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Aveti grija ca numarul maxim de amperi suportati al ESC-ului sa fie mai mult decat cat dau bateriile, iar voltajul sa se potriveasca cu motorul si cu bateriile (puteti folosi un modul step-up/step-down pentru a regla voltajul). ESC-ul trebuie calibrat dupa ce se monteaza toate partile componente.
Pe un calculator, in Arduino IDE, se deschide fisierul brushless.ino. Cu toate componentele atasate se incarca pe un Arduino. Dupa calibrarea ESC-ului este totul gata. Mai multe informatii despre ce face programul se afla, comentat, in cod.
Vezi fisierul aici.