
Integration of the Robot Operative System (ROS) and the BeagleBone through the meta-ros project, a layer for OpenEmbedded Linux.
This project is part of the Google Summer of Code (GSOC) 2013. The aim is to work in the integration of the Robot Operative System (ROS) and the BeagleBone. Both ROS and the BeagleBone are great tools and increasingly being used in robotics. Having both of them working together in a easy way would be a great asset.
A lot of users show their interest for ARM ROS integration. Some made a couple of tutorials about how to install ROS on Ubuntu on the BeagleBoard however this documentation is getting a bit old fashioned and probably not the right way. There's also some code to use lightweight versions of ROS but again, roboticists might not be looking for a light-ROS device but a fully functional one.
It's highly recommended to have the last version of Angstrom.
The Angstrom Distribution web is temporary down. If you wish to set Angstrom up follow [http://www.angstrom-distribution.org/](these instructions).
As answered in the FAQ, Angstrom should NOT be installed in the BeagleBone Black.
##Description of the files:
-
LICENSE: License of the code.
-
README.md: This document.
-
scripts: Scripts to automate processes.
-
docs: Documentation.
-
lib: Libraries used.
-
recipes-ros: OpenEmbedded recipes. These recipes should be used with the meta-ros code.
-
conf: OpenEmbedded configuration directory. This directory is added so that the beagle-ros project can be directly added as a layer in Angstrom/OpenEmbedded systems.
##Dependencies
This layer depends on:
URI: https://github.com/bmwcarit/meta-ros
branch: master
revision: HEAD
##Getting roscore running
-
Get an Angstrom distribution following http://www.angstrom-distribution.org.
-
Put the MLO, u-boot and FS in the SD card as explained in http://downloads.angstrom-distribution.org/demo/beaglebone/.
-
Update the Angstrom feed through
opkg update. -
Install git using
opkg install git. -
Get the beagle-ros code:
git clone git://github.com/vmayoral/beagle-ros.git. -
Install all the packages for ROS in Angstrom (30 minutes):
cd beagle-ros/scripts
source minimal-ros-install-angstrom.sh
-
source/usr/setup.bash. Updates in the ROS recipes doesn't install scripts in the/usr/directory anymore. To configure the enviroment properly check this bashrc file. -
run
roscore.
##First steps Getting started with Angstrom (or OpenEmbedded) and bitbake might be a bit tough at the beggining but it gets better and after a while you will love it, promised ;). First, take a look at the FAQ.
Beagle-ROS makes use of the meta-ros project, an OpenEmbedded layer that provides ROS to embedded devices. In order to get comfortable with meta-ros the diving-meta-ros repo aims to give you some aid with the first steps (take into account that this tutorial assumes that you are already comfortable with ROS. If not take a look at their tutorials).
##Installing the recipes
The easiest way to install the bitbake recipes provided is to git clone the beagle-ros code directly into the Angstrom sources/ directory and add the beagle-ros as a layer:
- Edit
conf/bblayers.conf - add
${TOPDIR}/sources/beagle-ros \to theBASELAYERSvariable
It's also possible to add the recipes inside of the meta-ros code. There're instructions in https://github.com/vmayoral/beginner_tutorials/blob/master/README.md of how to put these recipes in the meta-ros file structure. (Here you can see the recipes available).
##Cross-compiling the recipes
From the TOPDIR of Angstrom run bitbake <recipe-name>.
For example: bitbake beginner-tutorials
(Refer to the FAQ if you wish to cross-compile all the neccessary recipes to have ROS in your machine.)
Some ROS Packages designed for the BeagleBone:
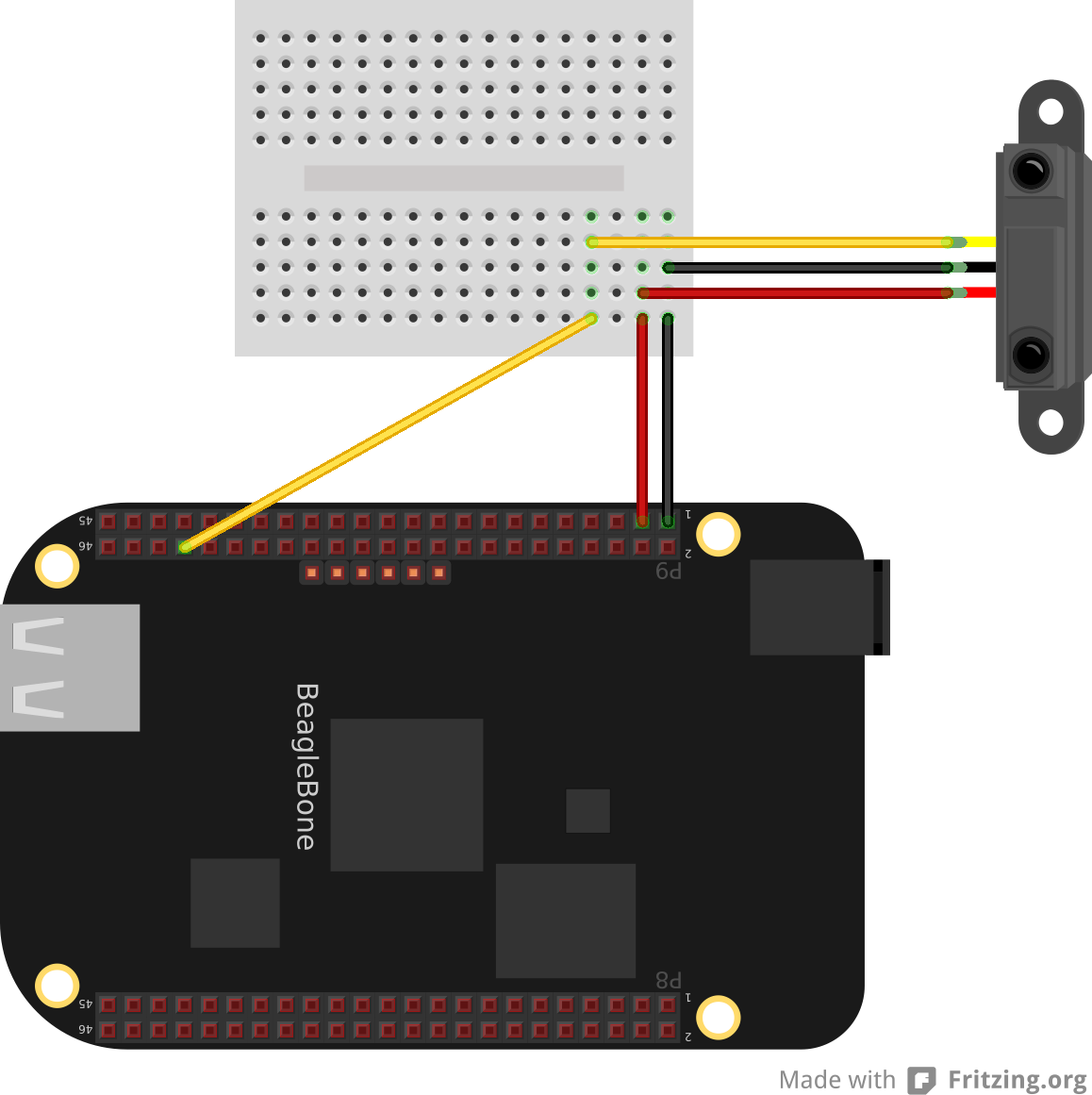
- bb_sharp_ir: BeagleBone Shark IR sensors ROS Package.
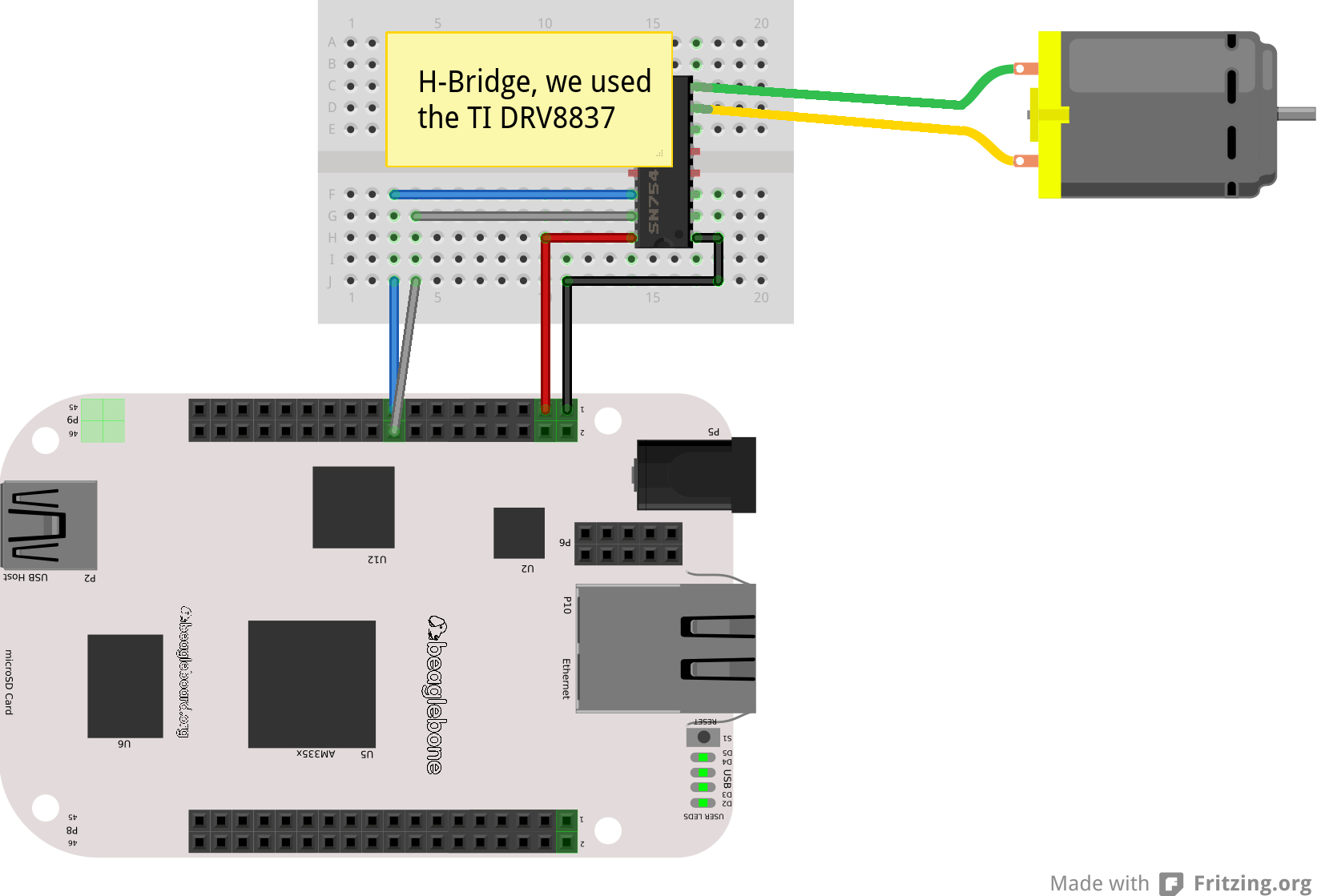
- bb_dc_motors: ROS package that launches a node to control a DC motor connected to the BeagleBone.
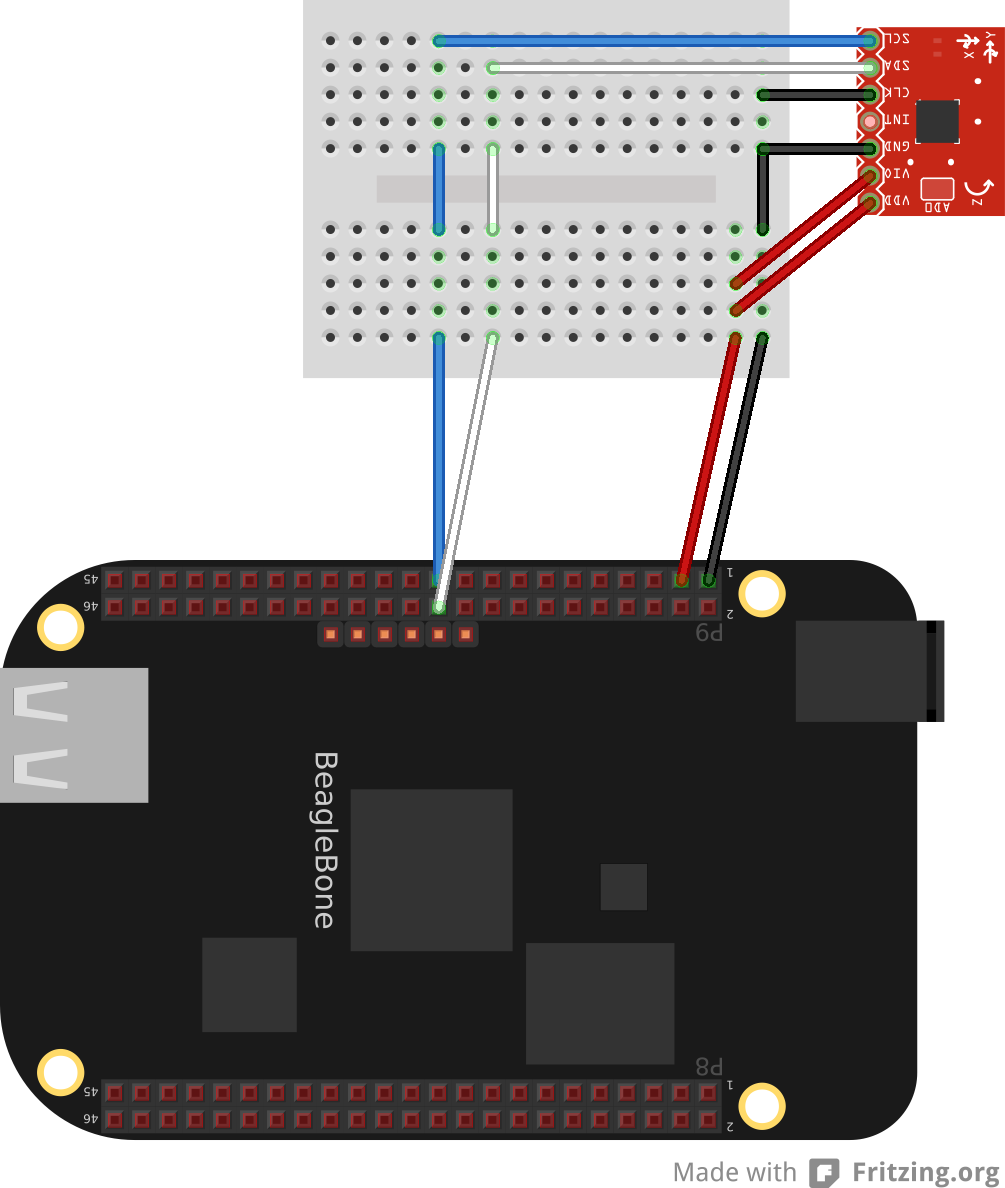
- bb_mpu9150: BeagleBone ROS package that publishes the Invensense MPU-9150 data into a Topic.
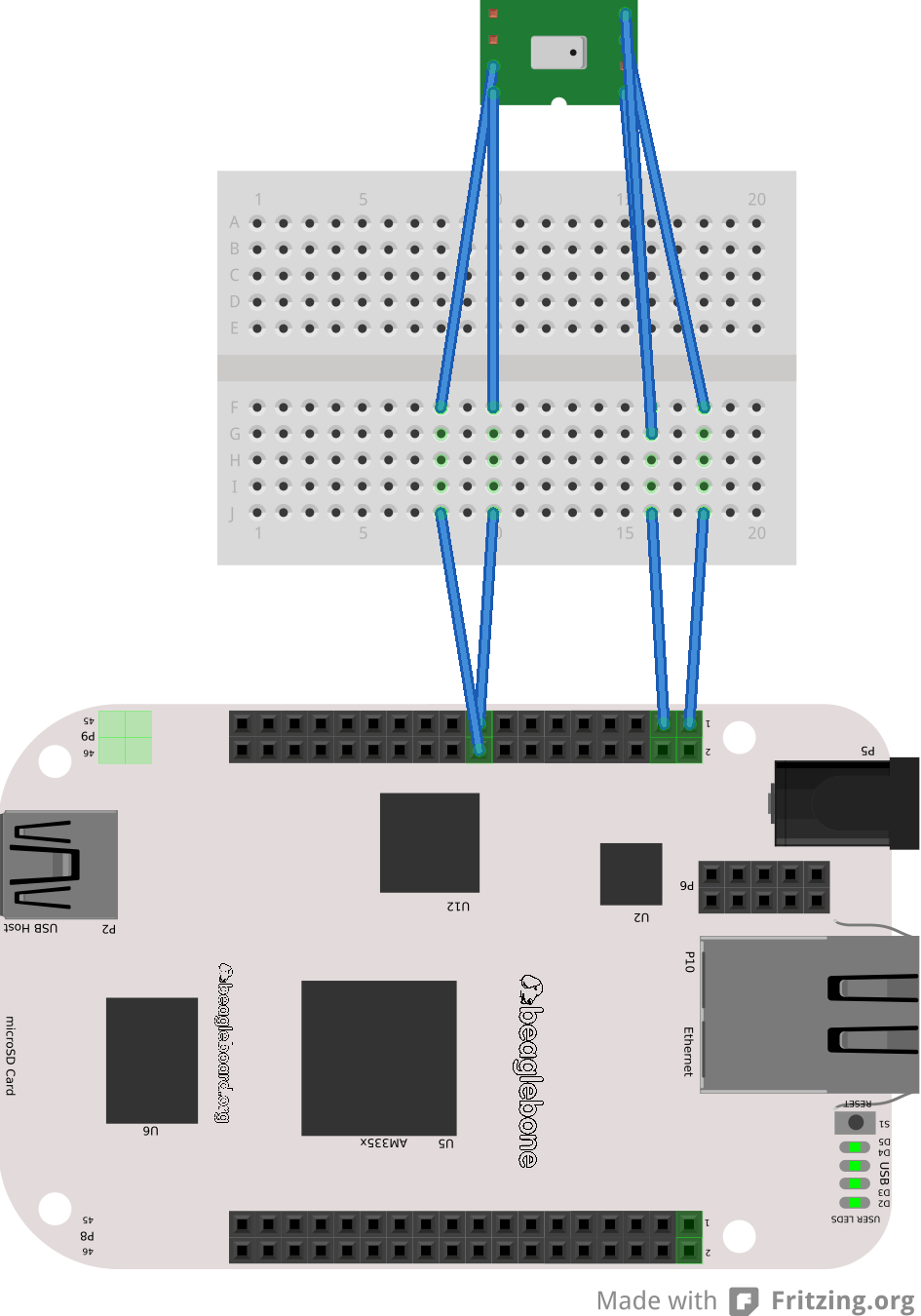
- bb_altimeter: ROS package for the BeagleBone that publishes the altimeter MPL3115A2 values to a Topic.
(recipes to cross-compile these packages are available at the recipes-ros folder)