Sparky
For information about Sparky 2.0 go here.
Sparky2 is available here: http://www.hobbiesfly.com/taulabs-sparky2-0.html
Be warned. There have been a number of reports of boards from Ready to fly quads/Witespy/various cheaper boards having bad regulators and barometers. They fly but are unable to perform well with altitude hold or navigation.
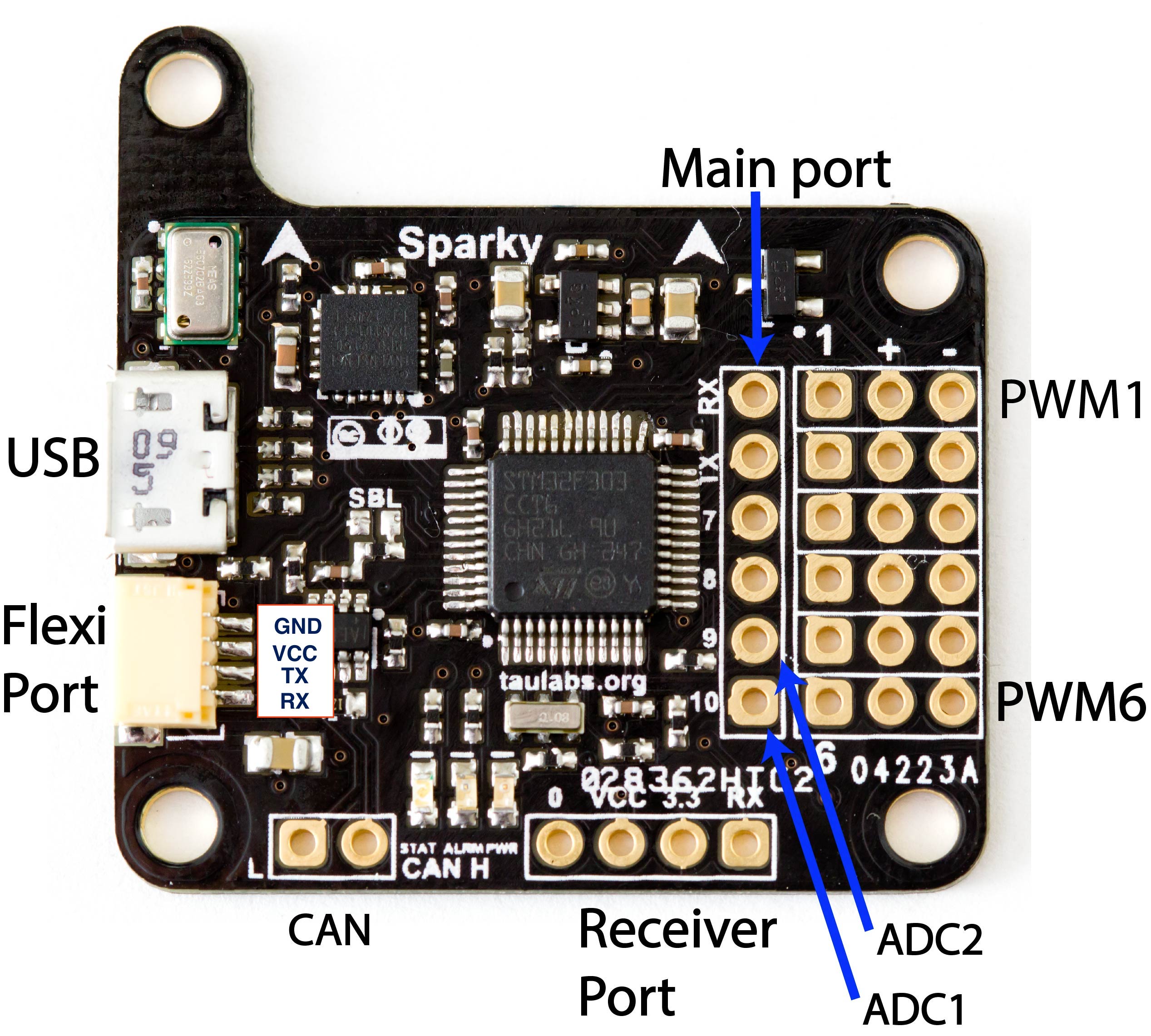
This is a flight controller designed by Peabody124 for Tau Labs. It is designed to be small and easy to assemble, while being highly capable for acrobatic flight, altitude hold, FPV, RTH or PH. It is open hardware and licensed as CC-BY-SA. The gerber files are available on github.
For more details on the design and development see this blog post.
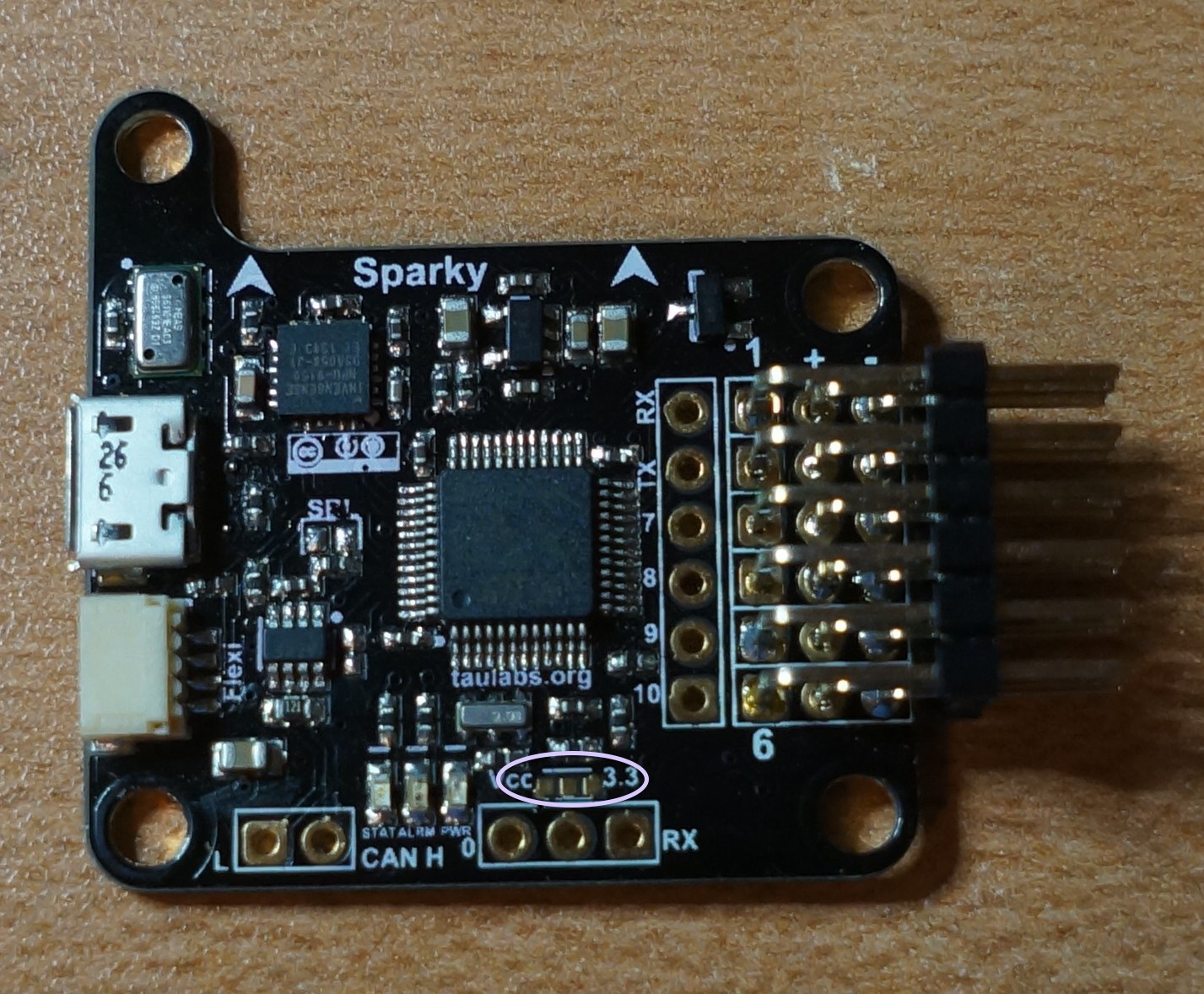
Version 1.1 replaces the 4 pin rcvr header with a 3 pin header and a solder bridge to select the voltage. This allows using a standard 3 pin servo cable without modification.
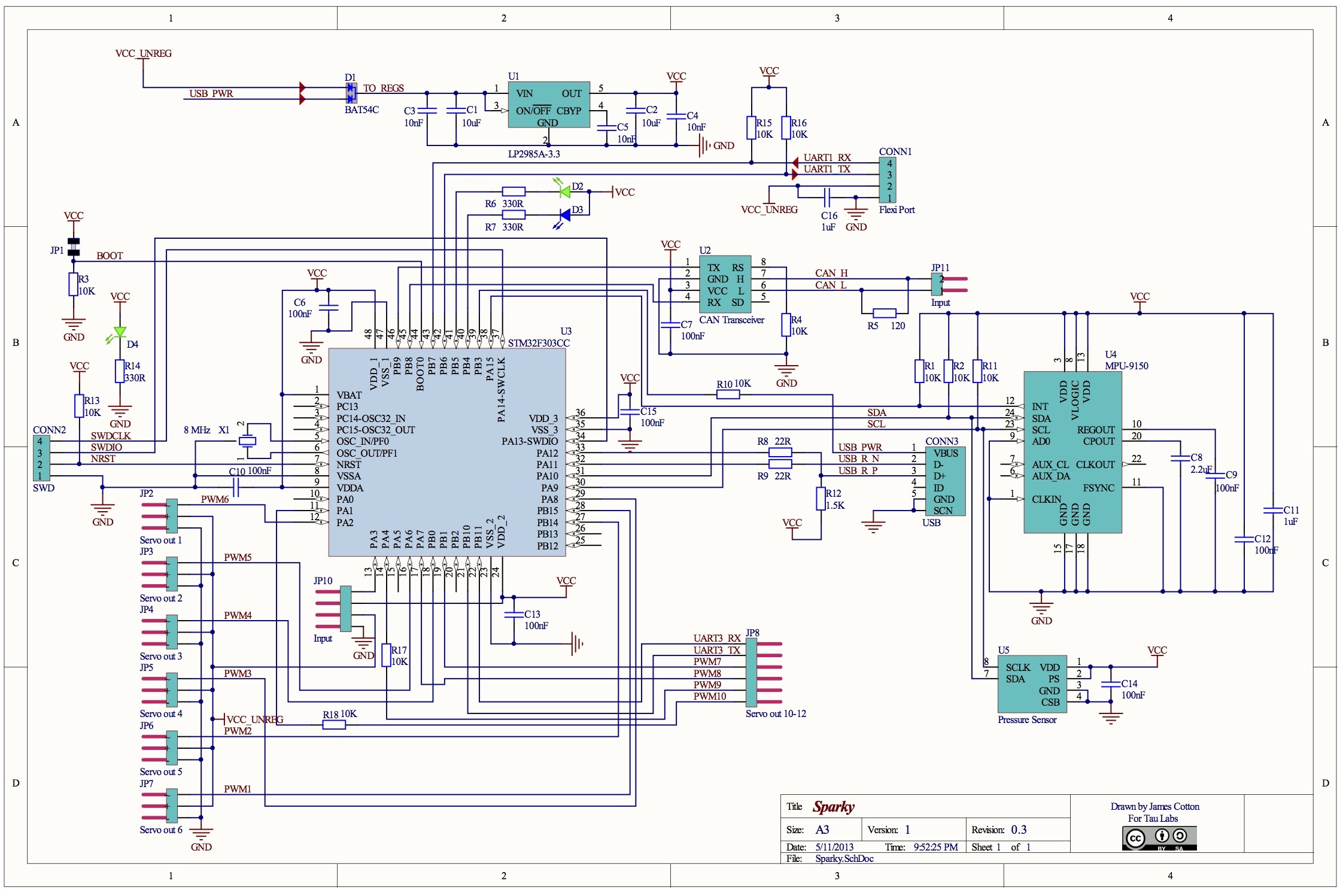
Here is the version 1.0 schematic and the version 1.1 schematic as pdfs.