Building and programming a hexapod robot with raspberry pi as the main CPU.
My brother has done the general design. I did coding, wiring, assembly, and later improvement in design. In this repository, you can find a pdf with complete documentation regarding this project, a simulation of a robotic leg, and code inside the robot.
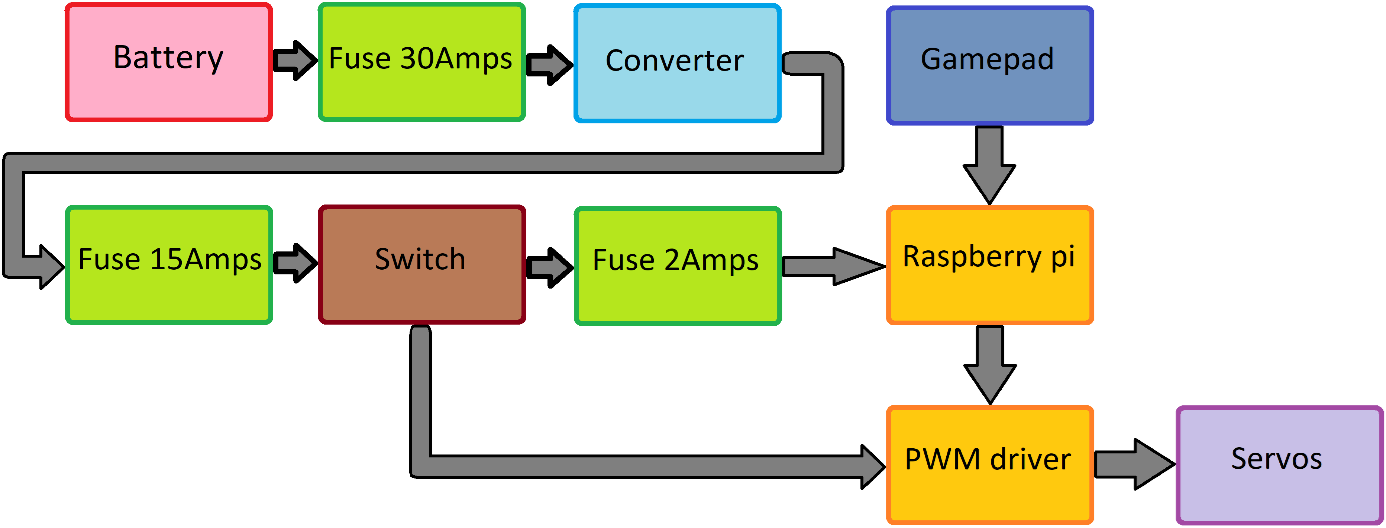
The whole circuit is uncomplicated. Every moderate electronic enthusiast can build it by himself. So, if you want to create a robot but need help coming up with some things, this repository will be helpful for you.
Everything about the robot is described in the documentation.