This repository contains the implementation of the following publication:
@article{zimmerman2023ral,
author = {Zimmerman, Nicky and Guadagnino, Tiziano and Chen, Xieyuanli and Behley, Jens and Stachniss, Cyrill},
journal = {IEEE Robotics and Automation Letters (RA-L)},
title = {{Long-Term Localization Using Semantic Cues in Floor Plan Maps}},
year = {2023},
volume = {8},
number = {1},
pages = {176-183}
}We provide a long-term localization solution and a semantic map format, for environments that undergo changes to their interior structure and detailed geometric maps are not available.
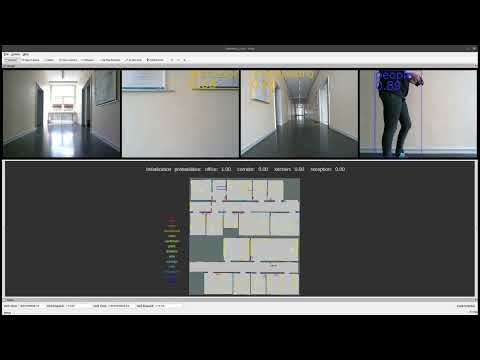
A visualization of our semantic-guided localization in a previously unseen environment can seen in the following video:
We enrich the sparse floor plans with geometric, semantic and textual information.

We use YOLOv5 for object detection, but in theory it can be replaced by any other model that provides our algorithm with class prediction, bounding boxes and a confidence score. You can download our trained model here.

We consider heirarchical semantic information, by building a higher level of semantic understanding based on the object detection results. We train a KNN classifier to infer the room category based on the objects detected in the scene. The format for the classification.pickle is a dataframe with 'samples' column which stores a one-hot-encoded vector corresponding to the semantic classes of the detected objects, and a 'predictions' column with an index corresponding to the correct room category. The training data for the classifier can be downloaded here.
Requirements:
- ROS 1 - Noetic
- OpenCV 4.5
- Eigen
- GTest
- JSON parser
- Packages - map_server, amcl, gmapping
- YOLOv5 - commit hash 7a2a118
To save you some pain, please follow to OpenCV installation instructions in this link.
Required installations
sudo apt-get install nlohmann-json3-dev
sudo apt-get install libgtest-dev
sudo apt install libeigen3-dev
sudo apt-get install ros-noetic-gmapping
sudo apt-get install ros-noetic-amcl
sudo apt-get install ros-noetic-map-serverFirst you need to build the ncore library since I don't have a global CMake yet. Tough life.
git clone https://github.com/PRBonn/hsmcl.git
cd hsmcl/ncore
mkdir build && cd build
cmake .. -DBUILD_TESTING=1
make -j12To see everything is built correctly, run the tests from the build directory
./bin/NMCLUnitTestsTo integrate OpenCV 4.5 to ROS, you must download vision_opencv to the ros1_ws/src folder, and then build the workspace
cd ros1_ws/src
git clone https://github.com/ros-perception/vision_opencv.git
cd vision_opencv
git checkout noetic
cd ../..
catkin_make
source devel/setup.bashIf you encounter errors related to OpenCV versions, you can check this.
You can download our trained model for object detection and data for room classification. Please place them in ros1_ws/src/yolov5_ros/models/.
You can our GUI app MAPhisto for editing semantic maps. MAPhisto allows the user to add geometric, semantic and textual information to a floor map. MAPhisto requires 3 inputs:
- occupancy grid map (map_server format)
- room segmentation
- floor.config For detailed gmapping-style occupancy grid, the room segmentation must be manually annotated. For axis-aligned floor plans, you can extract it with the CreateMapAssests.py script. Using the script will als create a floor.config file.
We use ROS wrappers to run the NMCL algorithm.
Requires as input 3 topics, LaserScan from the front lidar, LaserScan from the rear lidar, Odometry from VO or Odometry from the wheel encoders. The topic names are configurable through the launch file. This runs the correct and predict steps asynchronously, so correct is executed whenever we have odometry and predict is executed when an observation arrives. ConfigNMCLNodE publishes PoseWithCovarianceStamped messages with the pose prediction. To see the predictions in RVIZ, run
roslaunch nmcl_ros confignmcl.launch dataFolder:="path/to/data/folder/"The data folder used for the experiments can be found in ncore/data/floor/JMap.
The data folder should have the following items:
- nmcl.config - defines algorithm parameters, like sampling stratgy, motion/observation model, particle number, etc.
- floor.config - defines where the map resources are and semantic/textual information about the map
- .png/pgm/jpg
- .yaml (map_server format)
- .png/pgm/jpg (map_server format)
If you don't stick to this structure and naming, nothing will work. I didn't feel like putting to much effort on parsing and stuff. For an example of the content of these files, you can check out [this](nmcl/tst/data/floor/JMap). The data folder contains mostly things that are environment specific, like maps and algorithms definitions.
In addition, there is a configuration folder for sensors configuration. This includes:
- front_laser.config
- rear_laser.config
- cam0.config
- cam1.config
- ...
The folder in which they are stored in also configurable through the launch files, but their names are hardcoded for now. An example of the format of the calibration file can be found in here.
ConfigNMCLNodE can also use cues from the text spotting and object recognition nodes, which you can also enable through the launch file.
Listens to Image topics and publishes to a TextArray topic. Parameters:
- textSpottingConfig - the name of the textspotting.config file
- camIDs - I usually use my side-looking cameras (1, 3)
- cameraImgTopics - topic names for cameras with corrsponding IDs Camera IDs should match the cam*.config file. In the textspotting.config, make sure to give the correct path to where the text spotting models and alphabet files are located.
Listens to Image topics and broadcast to a YoloCombinedArray topic. In my implementation, I sync 4 cameras, get the prediction for all 4 images, and publishes it as a combined message. YoloV5Node.py has a hard-coded path pointing to where ever the YOLOv5 repository has been cloned to. So make sure to adapt it accordingly. Parameters:
- camIDs - I usually use all cameras (0,1,2,3) for 360 coverage
- cameraImgTopics - topic names for cameras with corrsponding IDs
- yoloTopic - where to publish the YOLO predictions
- weights - location of the model (.pt)
- conf_thres
- imgsize - set as max(image.height, image.width) for the camera streams
- dataset - the path for the dataset.yaml required for YOLO The YOLOv5 node can be replaced by a user-chosen object detetion/semantic segmentation pipeline, as long as the outputs conform to the format of the YoloCombinedArray message.
Listens to YoloCombinedArray topic and publishes to a Float32MultiArray topic. Based on the objects detected by YOLO, the room classifier predict which room category is more likely. Parameters:
- yoloTopic - where to listen to the YOLO predictions
- roomTopic - where to publish room category predictions
- picklePath - The path to the training data pickle for the KNN classifier
A visualizer for our abstract semantic maps. Parameters:
- dataset - the path for the dataset.yaml required for YOLO
- dataFolder - as explained previous
- mapName
- markerTopic - where to publish the semantic information